Stepmotor spikes: Cause and prevention
Stepmotors are widely used for accurate and precise motion. With the right electronics, they can even be forced into moving in mini-steps that they normally wouldn't take. The benefit here is ultra-fine increments of rotation. The drawback is that forcing motors into miniscule steps often produces jittery or uneven movement.
This error originates from physical flaws in both the motor and drive electronics. Motor phase imbalance (in inductance) is one of the biggest culprits. Inductance depends on the coils and rotor magnet, proportional to the number of turns per coil squared. Consistent inductance between phases is easy enough to achieve with correct motor windings; most stepmotor manufacturers have automatic winding machines that maintain consistency. What's trickier is proper rotor magnet design, which maintains consistent baseline inductance.
As far as driver-induced error, imprecise circuitry is to blame. A motor does what its driver tells it to do, so if the driver is feeding current to the motor in poorly formed sine-wave signals, the motor's ability to take even steps is compromised.
Q&A
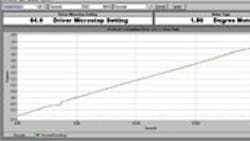
How is this error expressed?
Geometric and electrical imperfections show up as sudden but regular torque spikes. For example, on an industry-standard 1.8° motor/drive combination at 64-increment microstepping, motor detent torque causes a sudden jump or spike every 64th step. The few microsteps prior to the jump are smaller than expected (1.8/°64 = 0.028)° because just before the motor moves into full-step position (where stator and rotor poles are aligned) the rotor is pulled in two directions. More specifically, as the motor approaches full-step position, the pull (toward the aligned position) increases. The opposing force tries to compensate, dragging even harder, which induces smaller steps than normal. When the rotor can no longer resist the pull of the full-step position, it leaps into place. All error accumulated over the previous 63 steps is expunged, and cycle begins again, to be repeated during the next 1.8.°
How can designers eliminate inaccuracies?
Several driver manufacturers tweak sine waves or give users the option to alter driver performance. But many of these designs require that the motor be matched to the drive or specific tuning.
Another approach is pole-damping technology (PDT) that automatically reduces inaccuracies, regardless of motor type. In short, PDT outputs the right amount of current to the motor to keep every microstep as accurate as possible. This technology overcomes the motor's natural detent torque, which occurs wherever pole teeth align. By adjusting the current, in effect damping the poles, the PDT technique produces smooth and accurate motion.
What's going on when poles are damped?
Pole damping is timed to correspond with full-step position angles, where stator and rotor poles align. As the rotor sweeps through the full-step position — the zero-crossing point — one phase receives 100% current, while the other phase receives none. Then the correct amount of current is supplied to the phase that is 100%, and just before and just after the other phase goes to zero, an adjusted current is applied. This makes all steps more accurate, regardless of the motor's natural tendency to increment in full steps.
This month's handy tips provided by Mindy Lin Cheng, applications engineering specialist at Lin Engineering. For more information, visit linengineering.com.
