What’s the Difference Between Geared and Direct-Drive Actuators?

Download this article in PDF format.
Robotics development is being fast-tracked these days as companies look at ways to create new solutions for everyday problems. Robots are becoming smarter through artificial-intelligence (AI) learning processes, more dynamic in movement through design, and more efficient in industrial applications. However, actuators seem to get overlooked when it comes to their need for innovation.
Basics of Actuators
Actuators are the component responsible for providing movement and strength in the joints and axes of a machine, like a robot. A key factor in machine operations is a control signal and power input to facilitate movement. However, you also need to convert the output of the motor into usable speed and torque. Think of the gears on a bicycle. Your leg might not be strong enough to drive the wheel of the bike directly. Gears are used to change the torque required to drive the wheel.
The same goes for robotic actuators, where a traditional motor/gearbox combination functions together to convert the lower torque output of the motor to achieve powerful motion in the robot arm at a usable speed. The more complex the gear system (i.e., the higher ratio or more gear stages), which is typically required for higher-torque applications, the more backlash that exists in the transmission system. Backlash will impact the precision of the robot and in extreme cases, may even affect safety.
Backlash is the “slack” in the system, also referred to as the “play” in the gears (Fig. 1). For example, when moving the steering wheel of an old car left and right when the car is off, and there’s no power steering, you can feel some “play” or backlash in the system as the steering wheel moves but the tires don’t turn. This is because along the steering system, many connectors with small, acceptable, amounts of play add up to an overall large play in the system that can be felt.
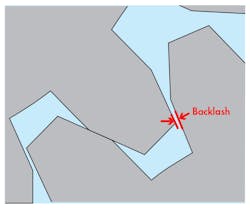
1. Backlash is the “slack” in the system, also referred to as the “play” in the gears.
It is very difficult to eliminate backlash in a gear system and nearly impossible with multiple stage gearboxes. The gears have to be manufactured with very tight fit, or tolerance, which can be costly. In addition, tight tolerances lead to high friction, or a mechanism is needed to keep the gears tightly engaged over their range of torque.
Flexible gear systems, like a strain wave gear, offer another method to help eliminate backlash, since the gearbox has some flexible components that take up the “slack”. Unfortunately, this can lead to potential fragility and makes backdriving—operating the device in reverse—very difficult.
Geared actuators are suitable for lower-speed applications because they enable motors to operate at high speed and lower torque in a “sweet spot” of efficiency. It also allows the system to use the relatively low-torque (weaker) motors common today.
The most basic type of gear is the spur gear, where the teeth within the gear will come into full contact for each engagement, causing large amounts of noise, and leading to wear and often the need for lubrication. The noise issue led to the creation of the helical gear, which allows the teeth to engage more gradually. When we change gear ratios to amplify torque, it comes at the cost of reduced speed. That’s because the motor driving the gearbox has its output speed reduced to amplify the torque. This is why gearheads are also often referred to as speed reducers.
Direct-Drive Actuator
In a direct-drive actuator, the traditional gearbox is removed. However, it requires the motor in the direct-drive actuator to be able to produce enough native torque at a usable speed (i.e., not thousands of RPM, but low hundreds of RPM). Direct-drive’s benefits are numerous, and it’s long been the dream of robot makers.
Direct-drive has no backlash because there are no gears; the torsional stiffness provides very high precision. Direct-drive is also fully back-drivable, providing great benefits in collaborative robots that need to be moved and positioned by humans. On top of that, high impact tolerance makes them very suitable for exoskeletons and walking robots, where the impact from walking can damage gears.

2. Direct drive actuators, like LiveDrive shown here, remove the need for a gear train altogether, which results in lower overall weight and less moving parts. These components can be produced at a low cost—at more than 50% of the cost of a traditional geared actuator.
Also, no gearbox means there’s a lack of inertia, which is a major advantage from a safety perspective in robots and machines. If a car starts rolling down a hill, the inertia built up makes it very difficult to stop quickly. A similar thing occurs with a gearbox: If you have a motor that runs at 4000 RPM and a 100:1 ratio gearbox, an instantaneous stop is not possible. The gearbox needs time to slow down.
The benefits also extend to the implementation of robotics solutions. Backlash in geared systems often requires complex programming to assist in improving precision to compensate for the “play” in the gears. This takes time and often needs to be constantly recalibrated. Gears also get damaged and must be replaced or lubricated, which adds to the maintenance costs.
The other benefit is cost. By eliminating the gearbox, a direct-drive actuator is really just a motor, rather than a motor/gearbox combination. That adds up to immediate cost savings. As the cost of actuation is brought down, it brings robotics closer to an inflexion point. This will accelerate the adoption of robots not only for industrial use, but also for consumer and non-factory use like healthcare.
New properties are being used in actuators to let robotic design operate without gears. Features to look for in a direct-drive are:
- Amplified magnetics: Look for unique configurations that increase the effective force of standard permanent magnets.
- Structural-magnetic synergy: The tremendous magnetic forces produced through amplified magnetics would collapse a conventional motor construction. This new level of magnetic performance requires a mechanical structure that’s strong enough to withstand the resulting forces, but light enough to give the highest torque-to-weight ratio
- Thermodynamic anomaly: Heat is a limiting factor in any electromagnetic device. The combination of the first two foundational discoveries provides a thin, lightweight structure that allows for heat dissipation. Effective heat dissipation let’s your actuator operate at much higher power levels than a conventional motor.
Genesis Robotics has an example of this direct-drive, gearless design called the “LiveDrive,” which encompasses these three foundational discoveries (Fig. 2).
So, What’s the Difference Between Geared and Direct-Drive?
As noted above, the main differences between these two systems are their cost and performance in robots. Direct-drive actuators, like LiveDrive, remove the need for a gear train altogether, which results in a lower overall weight and less moving parts. They’re components that can be produced at a low cost—at more than 50% less cost than a traditional geared actuator.
Eliminating the gear system also removes backlash, which has a significant impact on precision. Direct-drive solutions, can provide the highest level of accuracy, precision, and torsional stiffness on the market. Another key improvement is the ability to back-drive the actuator. They can also deliver this performance at much higher speeds, as the speed-reduction characteristics of a gearbox are removed from the system as well.
Actuator technology has remained unchanged for over 50 years. Their lack of precision in movement and cumbersome design has held back their potential. Not reengineering the actuator system, in addition to reducing the cost and complexity of actuation, has slowed the adoption of robots in consumer markets. Eradicating the gearbox and continuously developing technology around direct-drive actuators solve these problems, which in turn, improves performance and market accessibility.
Mike Hilton is CEO of Genesis Robotics.

About the Author
Mike Hilton
CEO
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: