Is Collaborative Robot and Worker Safety Possible?

Download this article as a .PDF
Due to the advances in sensing technology and motion systems, collaborative robotic applications are changing the way people and machines interact on the plant floor. This collaboration allows manufacturers and industrial operators to combine best practices of robotic systems, such as the strength and repeatability of machines, with the flexibility, adaptability, and intelligence of humans.
The result is a collaborative work environment that enhances production efficiency and flexibility, while also reducing the physical burden on humans. These advances in robotic systems are increasingly important as companies seek new ways to retain their skilled but aging workforce.
One of the key enablers of collaborative robotic applications is the safety technology that allows humans and robots to share the same workspace with less risk of human injury. Advanced safety technology is increasingly embedded in the robot and in the cell controller. Sophisticated sensors, safety controllers, and communication networks provide real-time safety data that allows robots to automatically respond to potential incidents (such as coming into contact with an operator) and reducing the need for safety cages (freeing floor space, saving money, and increasing flexibility in the way robots are used on the plant floor).
Today’s standards—provided by the Robotic Industries Association and various safety standards bodies—offer guidance on how robots and humans can work together to revolutionize productivity and safety in industrial operations.
Implementing Collaborative Robotics
A robot is not collaborative by itself and is only one part of a collaborative robotic application; it does not achieve safety compliance on its own. According to standards ANSI/RIA R15.06-2012 and ISO 10218, the term “collaborative robotics” describes an automatically operated robot system sharing the same workspace with a human.
There are four types of collaborative operations:
Safety-rated monitored stop. Sensors in the safety control system detect human presence and immediately stop the robot if a human gets too close. This is commonly used when humans and robots are working in close proximity or with overlapping work envelopes. A worker can load parts directly onto a robot end-effector while it is in a safe-stop condition. This helps improve productivity because the machine can keep running independent from the robot.
Hand-guiding operation. A less common method than safety-rated monitoring, it allows operators to manually control or reposition the robot for its next task. In this case, the operator is in direct contact with the robot arm and can utilize hand controls to reposition it—not a preferred method for tasks that require fast speeds.
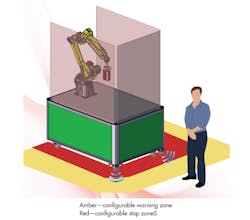
Speed and separation monitoring. This method allows operators and robots to work in the same space while maintaining sufficient distance from each other. If a human comes too close to a robot, sensors will trigger the robot to slow down or stop. These areas are indicated by using a yellow and red zone for slow down and stop, respectively. New safety sensor technology is making this application more popular in industrial operations.
Power and force limiting. With this method, if a robot accidentally contacts a human, the robot reduces its force or torque so the human isn’t hurt. This is an emerging method and the least commonly implemented. The robot needs to actually come into contact with a human before it knows to stop. Implementing this method requires understanding the relationship between different levels of force and pain thresholds on various parts of the human body.
Studies are being conducted to explore the power and force limiting method and make it possible. For example, standard ISO/TS 15066 outlines findings from one study on pain tolerance, which includes a list of maximum force and pressure levels for each part of the human body to help determine power and force limits. The standard provides some guidance on how to conduct a risk assessment for each part of the human body that could come into contact with a robot.
Most of these methods are intended to prevent humans from coming into physical contact with robots and machinery, but it is still critical to follow the functional safety lifecycle when designing collaborative robotics applications. ISO 12100 and ANSI B11:0 define the safety lifecycle and conducting a risk assessment is the first step, followed by defining functional specifications, using proper guarding, completing verification, and validation testing.

Assessing Risk
ISO/TS 15066 provides guidance for the design of collaborative workspaces, as well as how to conduct a risk assessment for collaborative robot applications. It supplements ISO 10218-1 and ISO 10218-2. In addition, RIA TR R15.306 provides a recommended methodology for conducting task-based risk assessments to meet the standard’s requirements. A proper risk assessment identifies all of the ways a human and a robot could potentially come into contact with each other, evaluating the associated level of risk, and mitigating that risk using appropriate measures.
The Future of Collaborative Robots
The growth of collaborative robotics is a new era for industrial operations. From taking over repetitive tasks and heavy-lifting duties to handling complex assemblies or meeting strict quality requirements, their usefulness spans different industries and applications. Getting there, however, will involve a number a changes for engineers. OEMs and end users need to adopt new standards, tools, and methods of analyzing risk. Organizations that embrace these changes will be ahead of the curve and positioned to realize the productivity gains and efficiency afforded by collaborative robots while enhancing worker safety and compliance.

About the Author
George Schuster
TÜV Functional Safety Expert (FSExp), Business Development Manager
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: