Planetary Gears: The Basics

This article was updated Feb. 28, 2023. It was originally published March 1, 2000.
Planetary gears can supply high levels of torque and high-speed reduction. They are also relatively compact compared to standard pinion-and-gear reducers, thanks to their inherent in-line shafting and cylindrical casing.
Here’s a look at the construction and mechanics of planetary gears and how engineers can take advantage of them.
Planetary Geometry
Basic planetary gearing consists of three sets of gears, each with different degrees of freedom. Planet gears rotate around axes that revolve around a sun gear which spins in place. A fixed ring gear holds the planet gears in orbit about the sun gear and meshes with both the ring and sun gears. The planet grouping’s concentricity with the sun and ring gears means torque is carried through in a straight line.
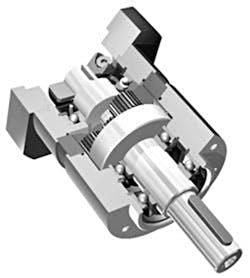
In a simple planetary setup, input power turns the sun gear at high speed. The planets, equally spaced around the central axis of rotation, mesh with the sun as well as the fixed ring gear, so they orbit as they roll. All the planets are mounted to a single rotating member, called a cage, arm or carrier. As the planet carrier turns, it delivers low-speed, high-torque output.
A fixed component isn't always necessary. In differential planetary gears, for example, every member rotates. These planetary arrangements can have a single output driven by two inputs or a single input driving two outputs. For example, the differential driving the axle in a car has planetary bevel gearing. The left and right wheel speeds represent two outputs, which must differ when the car takes a turn.
Even a simple planetary gear train has two inputs with the anchored ring gear providing a constant input of zero angular velocity.
Compound planetary trains, unlike simple planetary gears, have at least two planet gears attached in line to the same shaft. They rotate and orbit at the same speed but mesh with different gears. Compounded planets can have different numbers of teeth, as can the gears they mesh with. This option expands the mechanical possibilities and allows more reduction per stage.
Compound planetary trains can also be easily configured so the planet-carrier shaft drives at high speed, while the suns shaft turns at a lower (reduced) speed. Compound gear trains can also mesh with and revolve around fixed and rotating external gears at the same time, eliminating the need for a ring gear.
Amping up the Reduction
Simple planetary gears can provide speed reductions as high as 10:1. Compound planetary gears are far more elaborate and can provide much greater reductions. There are also simple ways to reduce or increase speeds, such as connecting planetary stages in series. Then, the rotational output of the first stage becomes the input to the next, and the total reduction becomes the product of all the stages.

Another option is to insert standard gear reducers into planetary trains. For example, high-speed power might get sent through an ordinary fixed-axis pinion-and-gearset before the planetary reducer. Designers sometime prefer this setup, dubbed a hybrid, as a simple alternative to adding planetary stages or lowering input speeds that are too high for some planetary units.
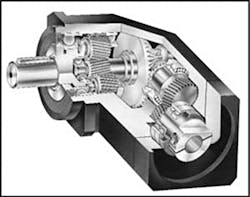
It also establishes an offset between the input and output. If the engineer needs a right-angle turn to the rotation, bevel or hypoid gears can be attached to an inline planetary system. Worm and planetary combinations are rare because worm reducers already change the speed.
Wear and Tear
Another benefit of planetary gears is that with several equally spaced planets (as is usually the case) the input and output shaft bearings avoid radial loads created by tangential gear reaction forces because the planetary gears’ forces cancel each other out. This means no radial forces act on the shaft bearings, so there is less chance of the outer casing distorting.

If the designer adds more planet gears, the load capacity and torsional rigidity increase. The added gears also distribute the load more widely and the planet gears’ teeth deflect and wear less. It follows that quite a large load can be driven in a comparatively small and streamlined planetary gear unit.
Helical gears can be used for load capacities greater than those of spur gears, given comparable gear sizes and numbers of planets. That’s because helical gears are angled, not straight toothed, so more teeth mesh at once. But with helical planetary gearing there are axial reactions, and these don't cancel with multiple planets like the tangential gear reactions do, so the bearings must handle the thrust load.
One group of components in planetary gears that can wear prematurely are the bearings supporting each planet gear. Space for these bearings is often limited, so planet bearings might be small compared to ordinary gear-and-pinion reducers where there is space for larger bearings.
READ MORE: Planetary Gears—A Review of Basic Design Criteria and New Options for Sizing

Thermal and cyclic fatigue in these bearings is possible due to the limited load distribution and the fact planet gears can spin relatively quickly on their axes. What's more, high speeds and heavy planet gears can create large centrifugal forces that add to the thermal and cyclic fatigue.
Planet Balancing
The load on planet gears is not perfectly balanced. One planet might end up closer or further than the others from the sun axis, or the axis of the carrier rotation might be slightly off. As manufacturing precision declines and the number of planets increases, the chances of an imbalance rise.
Sometimes the effect of an imbalance is small and the gearset can handle it. The planets might even “wear in” and gradually distribute the load more evenly. But some designs are sensitive to even the slightest imbalance and may need high-precision components and assemblies to compensate for it. One way to sidestep imbalances is to be more exacting in pinpointing balanced locations for the planet gears around the sun gear’s axis.
Other schemes to balance the planet loads include using floating subassemblies or “soft” mounts that allow small radial movements of the sun or planet carrier. It lets components continually shift just a little, helping to equalize uneven loading. Soft mounting assembly parts is not uncommon, but stiff assemblies can have advantages over flexible ones, so the answer isn’t always cut-and-dry.
Keeping it Quiet and Cool
The noise generated by planetary reducers is usually no louder than that from standard gear-and-pinion reducers. In fact, planetaries are usually quieter. Their smaller gears mean a lower pitch line velocity than comparably rated pinion-and- gear reducers. However, having many identical planet teeth engaging at the same frequency with each revolution of the input shaft adds noise, especially at high speeds. Using spur gears of reasonably high quality might bring down the noise. But helical gears, with their gradual rather than instantaneous tooth engagements, might be better for some operations.
Another noise reduction tactic is to design the gearset so the planets mesh out of phase from one another, providing a canceling effect. Damping also helps, as it discourages resonance.
A planetary gear train running at high speeds and continuous duty is apt to generate enough heat to justify the need for extra cooling. Ordinary gear-and-pinion reducers are large enough to act as their own heat sinks to keep the gearset cool. Planetary gear sets are smaller and more compact, and this limits heat dissipation.
To keep the gears cool, the lubricant can be sent through a heat exchanger, or a cooling fan can be designed in. If it is in continuous operation, the gearset has less time to cool off than if it runs intermittently. But without enough cooling, the operational speed might need to be lowered. Or, as mentioned, other kinds of speed reducers can be added ahead of the planetary reducer, although this adds cost and complexity.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: