Biomechanics Brings Robotics to the Mobile Era

This file type includes high resolution graphics and schematics when applicable.
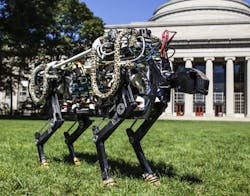
âSangbae Kim, professor at Massachusetts Institute of Technology, is leading the bio-robotic revolution with his work on the MIT Cheetah, a robotic running and jumping animal. We spoke to him about his accomplishments and plans for the future.

Kim: I was born in Seoul, South Korea, where I attended Yonsei University. I graduated with a bachelor’s in mechanical engineering. Afterwards I attended Stanford University to obtain my master’s degree and my PhD. Stanford is where I started working with bio-robotics for the first time. In 2006, I worked with the Prof. Mark Cutkosky to develop the Stickybot, which won Time Magazine’s Best Invention 2006. Stickybot is a gecko-inspired robot that could climb walls. I invented the directional adhesive that allowed the tiny hairs on the gecko’s feet to cling to the walls. The interaction between the toe hair and the wall is a molecular attraction called “van der Waals force.” This allows the gecko to hang on and support its weight on one toe while placing the other on the surface. I studied a lot about biomechanics and biology and tried to discover design principles to implement in mobile platforms. Afterwards I completed one post-doc year in Harvard at the microrobotics lab. In 2009, I started my assistant professorship at MIT and started working on the MIT Cheetah robot. This past year in 2016 I was awarded tenure at MIT.

Kim: Most industry robots are designed to perform rigid and accurate position control tasks in a fixed location. However, when it comes to the mobile robot, the design paradigm must be completely different from industry robots. When it comes to mobile systems such as humans, we have a different priority in controlling the whole body. It is more about maintaining balance and achieving force control rather than precise positioning. Animals are not necessarily accurate as machines in terms of their foot locations when they move. When humans go hiking, we do not control the placement of our feet or arms with sub-millimeter accuracy like manufacturing machines. It is a different control priority and to be achieved, and the machine needs to be designed differently.
For example, manufacturing robots are not designed to control force in dynamic situations like our feet colliding against the ground. Those robots also do not perform negative work. Negative work implies that you can absorb the shock from the ground, hence you are able to respond safely and properly to your environment. We have been redesigning the robotic system so that you can perform not only high power positive work but also negative work to dynamically interact with environments. If you think about most electrically powered machines, whether it be an engine or robot, they have been designed to do positive work only. Robotic arms, for example, rarely collide into anything for this reason; they do not dynamically interact with their environment. That is why you do not see many robots move like an animal or human being.
How is your current work involving the MIT Cheetah robot helping redefine the robot design paradigm?
Kim: In recent years, the scientific robotics community has focused on the potential role of robots in society, postulating functions and capabilities in areas ranging from home services to disaster response. The development of a legged robot capable of dynamic behaviors has been a great challenge. Funded by the DARPA M3 program, our work on the MIT Cheetah has made significant contributions in the areas of robustness, dynamic capability, and efficiency, utilizing a novel actuation design based on the extraction of biological principles in nature.
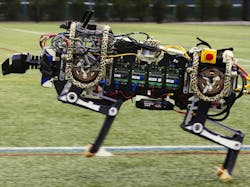
We chose the cheetah as a source of inspirations because it was the fastest of all land animals, so we can discover relevant design features much more easily, but there are many animals with similarities. The MIT Cheetah is capable of running up to 13.5 mph, achieving efficiency rivaling that of the real animal (cost of transport of 0.45, the lowest in the class), and turning and jumping over an 18-inch-high obstacle to a robust landing. It has garnered significant interest among students and the general public alike, illustrating the attraction and popular excitement engendered by advances in robotics today.
The constituent technologies that enable the MIT Cheetah’s achievements have been the major focus of my research at MIT. The work exemplifies an understanding of the requirements of animal locomotion and shows the effectiveness of bio-inspiration as a design tool. Along with proprioceptive actuation research, we developed impulse-planning algorithms that allow for stable, variable speed running, turning, and jumping. The bio-inspired leg structure of the robot plays an important role in its dynamic performance by minimizing leg inertia. The constituent technologies that enable the MIT Cheetah’s achievements have been the major focus of my research at MIT.
Designing a high strength-to-weight ratio leg design is critical in many aspects. Lightweight limbs will minimize the impact loss, swing cost, and improve force-control bandwidth. The strength requirement is severe in dynamic locomotion. Observing how leg designs in nature satisfy low inertia and complexity without compromising strength, I hypothesized that employing a tensegrity-like structure found in musculoskeletal systems would significantly reduce bone stress by decreasing bending moment, hence distributing the stress more uniformly. This hypothesis was applied to the leg design of the MIT Cheetah. According to finite element analysis of the MIT Cheetah design, the stress reduction was 80% at static test, and 40% throughout a running stride with 550N ground reaction force.
This design principle can change the design paradigm of robotic structure and human assistive devices where strength-to-weight ratio is critical.
We developed a running algorithm of the MIT Cheetah, based on hypotheses formed by biomechanical studies. The constitutive hypotheses are (1) animals prescribe the net impulse of each stride by force-profile commands to balance the vertical momentum loss induced by gravity; (2) in the swing phase, the leg is tracking a trajectory with a relatively constant swing period (supported by dog-running data): and (3) the sagittal plane controller can be largely decoupled from the frontal plane controller. Utilizing high-bandwidth proprioceptive actuators, the amount of vertical impulse at each step is planned and executed to match the vertical impulse requirement. As a result, we successfully developed a highly stable galloping algorithm capable of running up to 33 mph in simulation and outdoor bounding of the MIT Cheetah in real time. As we expanded the capability of the robot, we developed an autonomous obstacle-jumping algorithm. Once the LIDAR sensor detects the profile of the obstacle and distance from the robot, the real-time optimization runs to adjust the step size to match the stride with respect to the obstacle, and find a feasible jumping trajectory and calculate the proper amount of vertical impulse to clear the obstacle.
How do you feel bio-robotics can change the world of automation and the job place?
Kim: I believe that we are entering an era of mobile robotics. By robots becoming more mobile we can use them in life-and-death situations, for delivery of goods, and environments that are hazardous for humans to enter. We currently do not have machines that can follow human speeds. We are living in an era that allows for cars, trains, planes, and even space travel only because we have created an infrastructure that allows it. If we look at Fukushima, the site of the nuclear plant disaster in Japan, there are areas that humans can still not enter. Regardless of the radiation, the major drawback is that we do not have reliability in our current machines to survey a dangerous landscape.
The MIT Cheetah is possible due to the work done at the university level. Can you describe the importance of university research for innovation?
Kim: I believe it to be pioneering. Nobody has ever built this kind of machine before. Five to six years ago when I started on this project, nobody said it was possible. Everyone said that designing a machine that could run and jump using electrical motors was science fiction. Many said that it was only achievable via hydraulic actuation. Hydraulics are powerful and used in a variety of machines, but are very inefficient and expensive. Only with electronic actuation were we able to build a machine with the same efficiency as a real live animal. The university level is the only place that can take on this new direction and change how people think.

