What’s the Difference Between Mechatronics and Electromechanics?

Download this article as a .PDF
The terms electromechanics and mechatronics seem similar, but there are some subtle differences. It also appears that if and when the newer term, mechatronics, is fully defined, their differences may very well be much more significant than they are right now.
The older term, electromechanics, dates back to at least 1885, when engineering students at some colleges could take courses in it. Basically it’s a combination of electrical and mechanical engineering. Note that classical electrical engineering does not involve any kind of ICs or semiconductors. Those are in the realm of electronic engineering. (That’s why IEEE makes a point of including both electrical and electronic engineers in its name.)
Prior to about 1950, only a few purely electrical devices were of any use. Maybe the lightbulb and the radio. To get any usefulness out of a motor or magnet, they had to connect to mechanical devices such as gears, belts, relays, or solenoids. These components could then be used to construct a range of devices, including electric typewriters, starter motors, clocks, pinball machines, meters of all kinds, early televisions, and even digital computers. Electromechanics quickly became the study and application of combining electrical signals and components with mechanical linkages and assemblies.
In 1947, the transistor was invented and shortly thereafter, the world was on its way to becoming electronic. At first, engineers were replacing mechanical controls and components with electronic versions. Electronics were less expensive, less prone to manufacturing or installation errors, and with no moving parts, wear was not an issue. Electronics also unleashed computer technology and its sidekick, software, with advances happening almost too fast for manufacturers to take advantage of them all.
By the late 1960s, Yaskawa was using electronic controls on its electric motors. That’s when an engineer at the firm coined the term “mechatronics.” It soon became accepted as the combination of electronic and mechanical engineering, as well as software. Yaskawa even registered the term as a trademark.
One of the major differences between earlier electromechanical devices and mechatronic versions was that the latter offered more flexibility in design and operation. A chip could replace several mechanical devices and be programmed to do different tasks using those same devices. Mechatronics also increases the speed and precision possible with motion control. Moreover, it made automated data collection and reporting possible.
Some engineers believe mechatronics came out of robotics. They base this belief on the fact that several innovations first applied to robots eventually made their way into other machines. These include sensory feedback and coordination of motions.
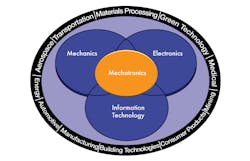
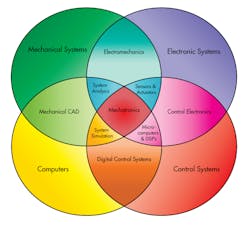
By the 1990s, mechatronics also included communication among machines, such as networked manufacturing equipment. Soon, information technology, control engineering, and sensors and actuators all fell under mechatronics.

Two main forces push mechatronics today: It lets designers develop new products and processes faster and less expensively; and it enables companies to meet global demands and keep up with global competition.
Still, mechatronics doesn’t have a universally accepted definition. For example, Purdue University’s engineering schools started a mechatronics technology program that includes mechanicals design, manufacturing, and electrical control based around packaging machinery. It’s aimed at providing the packaging industry with designers and engineers, as well as automation specialists and service technicians. This seems rather limited.
But others want mechatronics to include anything with a moving part and some form of electronics, which seem too expansive. For now, the generally accepted differences between electromechanics and mechatronics are that the former is the combination of electrical and mechanical components, while the latter includes chip-based controls, software, and networking.

