Five Design Tradeoffs When Specifying Stepper Motors
Key Highlights:
- Proper evaluation of torque margins across the full motion profile prevents stalling and ensures consistent performance under varying load and speed conditions.
- Mechanical resonance can cause vibrations and instability; addressing system dynamics through inertia matching and damping enhances stability.
- Control strategies, including acceleration profiles and current regulation, significantly impact motion smoothness and system reliability.

Stepper motors are increasingly important for positioning tasks in automated systems due to their compact size, cost efficiency and accuracy. Real-world performance, however, depends on more than nameplate specifications. During system specification, five key design tradeoffs determine whether stepper-driven motion remains stable, accurate and reliable.
Torque Margin Assumptions
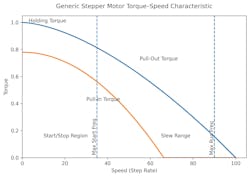
Holding torque is an attractive stepper-motor specification because it is clearly defined, easy to compare and typically the highest torque value listed on a datasheet.
The problem with using holding torque as a key specification is that available torque decreases as speed increases, while acceleration increases torque demand on the motor. Once the motor begins moving, torque-speed characteristics—not holding torque—determine what the motor can deliver. Acceleration demands, load inertia and supply voltage all shape usable torque during motion.
When torque-speed characteristics are overlooked, systems that appear adequately sized on paper can stall during acceleration, miss a step under transient loads or behave inconsistently across operating conditions. These failures may not be immediately obvious, particularly in open-loop systems where position errors are not automatically detected.
For reliable operation, torque margins must be evaluated across the full motion profile, including speed, acceleration, load inertia and duty cycle.
Mechanical Resonance That Limits Usable Performance
Once torque requirements are met, it is easy to assume the motor will behave predictably across its operating range. In reality, stepper motors excite mechanical systems in ways that can introduce resonance and instability.
In this context, resonance refers to mechanical oscillation that occurs when the motor’s step frequency aligns with the natural frequency of the motor-load system. Because motion occurs in discrete steps, torsional oscillations can develop, particularly at certain speeds where the motor, coupling, and load interact with the system’s natural frequencies. Load inertia, compliance, and mounting stiffness all influence how these dynamics manifest in practice.
When resonance is not adequately addressed, systems may exhibit vibration, audible noise or inconsistent motion. In more severe cases, oscillations can reduce effective torque or lead to missed positioning, even when torque margins appear sufficient. These behaviors are often intermittent, which can make them difficult to diagnose during initial testing.
From a design perspective, mechanical dynamics must be considered alongside electrical sizing. Factors such as inertia matching, coupling selection and damping play a role in determining whether a stepper-driven system remains stable across its speed range. Ignoring these interactions can limit usable performance to well below what static specifications suggest.
This tradeoff does not mean stepper motors are unsuitable for precision motion. It simply means that designers must account for mechanical resonance early in the specification process to ensure smooth and predictable operation.
Thermal Limits Shaped by Duty Cycle
If a motor meets motion requirements under nominal conditions, it is often assumed that heat generation will remain manageable.
In practice, stepper motors generate heat continuously, even when holding position. Because current is typically applied regardless of motion, thermal rise is driven not only by load but also by dwell time, ambient temperature and enclosure conditions. Over extended duty cycles, heat accumulation can significantly affect motor behavior.
When thermal effects are underestimated, torque capability can degrade as winding resistance increases with temperature. Excessive heat can shorten insulation life, reduce reliability, or limit allowable duty cycle. These effects may emerge gradually, making them easy to overlook during initial testing.
From a design standpoint, thermal performance must be evaluated across the full operating cycle, including periods of dwell, holding torque requirements and worst-case ambient conditions. Strategies such as current reduction at standstill and maintaining conservative thermal margins may be necessary to maintain consistent performance.
This tradeoff does not imply that stepper motors are inherently inefficient, but it does require designers to treat thermal behavior as a primary design constraint.

Control Choices That Define Motion Stability
Stepper motors are often associated with simple, open-loop control. There may be the expectation that basic pulse generation and current limiting are sufficient to achieve reliable motion. This simplicity is frequently viewed as an advantage during system specification.
In practice, motion control strategy plays a significant role in determining how a stepper-driven system behaves under load. Acceleration and deceleration profiles, drive current settings and supply voltage all influence whether available torque can be delivered smoothly throughout the motion profile. Inadequate control choices can stress the motor during startup or direction changes, even when steady-state requirements appear modest.
When control parameters are poorly matched to the mechanical system, symptoms may include stalling during acceleration, inconsistent positioning, or excessive vibration. These issues are often attributed to mechanical or sizing problems, when in fact they originate in how motion is commanded and regulated.
From a design perspective, motion control strategy must be considered as part of the motor specification. Evaluating acceleration limits, voltage headroom and current regulation alongside mechanical requirements help ensure the motor operates within its usable performance envelope.
This tradeoff does not eliminate the appeal of stepper-based motion control, but it does underscore that predictable performance depends on deliberate control choices made early in the design process.
Open-Loop Limits and Error Visibility
Stepper motors are commonly applied with the expectation that commanded motion will be executed as intended, provided torque margins and control parameters are properly set. In open-loop systems, position is inferred rather than measured, which simplifies design and reduces system cost.
In practice, open-loop operation limits the system’s ability to detect and respond to errors. Missed motion, load disturbances or transient stalls may not be immediately apparent, allowing position error to accumulate.
When error visibility is limited, diagnosing performance issues becomes more challenging. Intermittent faults may be mistaken for mechanical wear or process variation, delaying corrective action. In applications with safety or quality constraints, undetected position loss can have broader consequences.
From a design perspective, the level of error visibility required must be weighed against the need for fault detection and recovery. Evaluating whether position feedback, stall detection or other monitoring mechanisms are warranted helps define the appropriate balance between simplicity and robustness.
This fact requires designers to explicitly consider how much error visibility is acceptable for the application.
Gain Stepper Motor Predictability
Stepper motors remain a practical motion solution in many automated systems, but predictable performance depends on how deliberately they are specified. The five design checks outlined here focus less on technology selection and more on execution.
Evaluating torque margins across the full motion profile, accounting for mechanical resonance, respecting thermal limits, making intentional control choices and understanding the limits of open-loop operation all contribute to motion systems that behave as expected in real applications. When these considerations are addressed during specification, stepper-driven designs are more stable, easier to commission and less likely to introduce avoidable issues later in the system lifecycle.
About the Author
Steve Sterling
Steve Sterling is a Minnesota-based freelance writer and editor.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: