Beyond Rigid Bodies: Mastering the Kinematic Mapping of Non-Rigid Materials

In the world of industrial automation, “rigid” is the engineer’s best friend. When handling steel billets or injection-molded plastics, the physics are deterministic, the mass is constant and the coordinate frames are fixed.
However, in the realm of high-speed manufacturing, the manipulation of non-rigid materials presents a far more complex reality. Textiles, flexible films and poly-composites—with their non-linear elasticity and infinite degrees of freedom—represent the ultimate challenge in modern motion control.
READ MORE: Beyond Adhesives: The Kinematic Shift Toward Mechatronic Determinism
At Softwear Automation Inc., an Atlanta-based robotics and sewing solutions company, the goal was not merely to move a part, but to replicate the nuanced dexterity of a human operator in a non-rigid realm. The most significant hurdle in this endeavor is a geometric paradox: While the final product (a fully sewn shirt) is often defined by circular or polar geometries such as collars, cuffs or sleeves, the processing zone, such as a specialized sewing or joining head, is almost universally linear.
Navigating this transition at industrial speeds requires a sophisticated electromechanical architecture capable of real-time coordinate transformation and sub-millisecond synchronization.
The Limits of Fluid Power in Path Control
In many automated systems, pneumatic actuation is the "easy" button. It offers high power density and a low cost of entry for bulk transport. In our design architecture, as detailed in US11268223, we retained pneumatics for these macro-transitions, which handled the high-force requirements of initial material placement and gross-positioning.
However, once the substrate enters the "active" processing zone, the physics changes. The compressibility of air introduces a non-linear latency—a "squish”—that is incompatible with the high-frequency response required for complex path-following. If air pressure fluctuates by even a small margin, the resulting timing error leads to material bunching or catastrophic tearing.
To bridge this gap, we implemented a hybrid electromechanical control layer. By handing control to a precisely synthesized mechanical linkage driven by high-resolution servomotors, we replaced the uncertainty of fluid power with a deterministic power train. This allows the machine to maintain a rigid, predictable relationship between the motor’s encoder count and the fabric’s spatial orientation in real-time.
Solving the Linear-to-Circular Mapping Paradox
Except for basic side seams, nearly every structural element of a shirt is rounded. Yet, a sewing machine head expects a straight line. This creates a high-stakes kinematic problem: How do you feed a 3D circular path through a 2D linear gate without deforming the material?
READ MORE: Inverse-kinematics software designs modular robots
Our solution utilizes a simultaneous dual-coordinate approach. We treat the material’s movement as a continuous transformation between Cartesian (x, y) and Polar (r, theta) frames. As the non-rigid material enters the work zone, the electromechanical linkages must compensate for the tangential velocity of the curve to ensure the material appears linear to the machine head.
This is achieved through a Jacobian-based transformation matrix that modulates the feed rate based on the instantaneous radius of the part. If the system is processing a curve, the actuators must move in a synchronized relationship to maintain a constant linear velocity relative to the processing head:
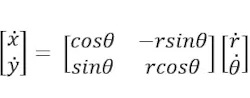
By switching frames mid-cycle, we ensure that the material velocity remains perfectly synchronized with the processing frequency, maintaining structural integrity regardless of the seam’s complexity.
The Electronic Retina: Closing the Loop at 250 mm/s
Precision kinematics are only as good as the feedback loop. When dealing with textiles, the material itself acts as a variable spring. At a cycle speed of 3,000 stitches per minute, which translates to a linear material velocity of 250 mm/s (assuming a 5 mm pitch per stitch), the mechanical system has a window of roughly 20 milliseconds to execute a movement and stabilize for the next.
Traditional sensors are far too slow and also not a reliable source in order to detect the microscopic shifts in fabric weave or the subtle "creep" of a flexible film in real time. We integrated a high-end machine vision algorithm that functions as the system’s “retina.” This system does not just track the edge of the material; it performs a high-frequency analysis of material deformation and weave orientation.
READ MORE: The kinematics and dynamics of non-Cartesian actuators and robotics
This visual data is fed into a PID controller that modulates the electromechanical linkages. By focusing on the derivative (Kd) component of the control law, the system can anticipate material shifts based on the rate of change of deformation:
This allows the electromechanical linkages to adjust the trajectory before the error exceeds the tolerance of the seal. The result is a closed-loop system that doesn’t just run a program, but “feels” and reacts to the substrate.
Engineering for Scalability
In a high-throughput environment, performance is measured not just in speed, but in reliability. The transition to electromechanical linkages (as detailed in US11939714) significantly improves the deterministic nature of the machine. By eliminating the variables associated with compressed air and relying on pure mechanical synchronization, we achieve a system that can run for millions of cycles with sub-millimeter accuracy.
The move toward electromechanical actuation for non-rigid handling goes beyond incremental upgrade by offering a higher precision, repeatable and programmable control. By separating high-force bulk motion from high-precision path control, we have solved the conflict between 3D product design and 2D machine processing.
As engineers, our goal is to codify the “intuition” of a skilled operator into a mathematical framework. In doing so, we unlock automation that can handle flexible materials with the same dexterity as a human hand.
About the Author

Santosh Yadav
Hardware Development Engineer, Amazon Robotics
Santosh Yadav is a hardware development engineer at Amazon Robotics, where he develops high‑speed, precision mechatronic systems for next‑generation industrial automation. With more than a decade of experience in U.S. robotics, electromechanical design and high‑throughput automation, his work emphasizes operational determinism, robust kinematic architectures and sustainable system performance at scale. He is an active member of IEEE, ASME and the ISA96 standards committee, and is an inventor on multiple U.S. patents in automated material handling and kinematic synchronization. He welcomes feedback and discussion on applying POWERSET to specific automation challenges. Reach him at [email protected].
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: