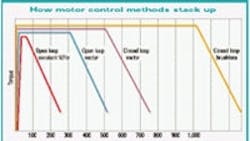
MSD 101: Adjustable speed drive control methods
Internal-combustion engines run on the explosive power of burning gasoline; electric motors, by contrast, run on magnetic flux. There are several ways to create and manipulate flux, thereby controlling motor speed and torque.
One method maintains a constant voltage-to-frequency (V/Hz) ratio across the motor coils, holding airgap flux constant and within safe limits. Some controllers (with torque boost) will kick up the voltage at low frequencies to compensate for the IR drop across the stator resistance.
Another, more-versatile method (flux vector) provides independent control of torque and flux. It, too, keeps V/Hz constant in an attempt to maintain constant flux. Flux and torque are typically derived from machine voltage, current, and speed. In an open-loop system, speed is estimated using a mathematical model. Closed-loop systems, on the other hand, measure speed directly, improving accuracy as well as bandwidth.
A fourth method, similar to flux vector, is used with permanent-magnet (PM) brushless servomotors. Here, the machine itself produces the optimum amount of flux, the result of a permanent-magnet rotor. This, plus the fact that a PM rotor has relatively low inertia, translates to high torque bandwidths on the order of 1,000 Hz.
Questions & answers
Q: What is “torque bandwidth?”
A: All motor drives have a limit in terms of dynamic range. The maximum frequency at which a drive can deliver torque is called the torque bandwidth, and is usually specified at a nominal power rating, say, 7.5 kW.
Q: What’s the main limitation of the V/Hz “volts per hertz” method?
A: Dynamic performance. Torque bandwidth is about 50 Hz; torque control is inaccurate and nonlinear below 10 Hz; torque itself drops dramatically below about 3 Hz.
Q: How does closed-loop vector compare to open loop in terms of performance?
A: Torque bandwidth for closed-loop vector is typically around 500 Hz and allows continuous operation down to zero speed. In the case of open-loop vector, the process of estimation reduces torque bandwidth to about 300 Hz. On the other hand, full torque (plus overload) is available down to about 1 Hz and stable at all speeds and loads.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: