Recognizing motor temperature sensor limitations
In the first installment of this series, "Calculating a practical hotspot safety margin", we discussed how two-parameter thermal models assume that the entire motor, including windings, exhibits one dynamic temperature. Servomotor manufacturers and users most commonly apply this oversimplified thermal model to make duty-cycle calculations -- and most manufacturers publish only one value for any given motor's winding-to-ambient thermal resistance Rth with the thermal time constant. For this reason, motor users must make duty-cycle calculations using this two-parameter model, unless they test and measure operating motor temperatures in house, which is unlikely.
An argument could be made that with the right sensors to protect a motor from overheating, the simplified model is acceptable. However, as we'll explore in this installment, even this approach has limitations.
Motor ratings
Data sheets for typical brushless dc (BLDC) servomotors normally include continuous or safe-operating-area torque-speed curves plus intermittent peak curves. A safe-operating-area torque-speed curve defines a torque-speed boundary within which a motor can operate safely and indefinitely without exceeding its maximum continuous operating temperature when powered by a specified drive under a specific ambient condition.
Published peak torque-speed curves typically specify at least a 2:1 peak-to-continuous torque ratio, or even a 4:1 or 5:1 ratio where a motor is rated for it. However, commanding a servomotor to output peak torque greater than its 1x maximum continuous value for too long causes overheating.
Case in point: 4x peak torque corresponds to 16x power dissipation in the motor's electrical winding. Why? As torque output increases linearly with current, electrical resistance power dissipation amounts to I2R where I equals current and R equals winding resistance.
In short, commanding a servomotor to output peak torque is normal (and allowed) but duty cycle must be kept to below 100% or the motor windings can overheat and even fail.
Thermal models
Used for over 50 years, the two-parameter thermal model assumes that any given motor has one dynamic operating temperature, and one winding-to-ambient thermal resistance Rth (¢XC/watt) in parallel with thermal capacitance Cth (joule/°C). It's a model analogous to a simple RC electrical circuit: Solving this two-parameter thermal model for both constant power dissipation heatup and zero power dissipation cooldown shows that the motor both heats up and cools down predictably and exponentially with thermal time constant T (sec) where T = RthCth. For this reason, servomotor data sheets generally report both Rth and T -- to allow the calculation of a motor's two-parameter thermal capacitance.
A four-parameter thermal model is more modern and accurate in predicting winding temperature when current supplied to a servomotor exceeds 1x continuous current. Measurements show that even within a motor's windings, there can be significant temperature differences.
Furthermore, thermodynamics dictate that for heat power to flow from within the motor towards its outer exposed surface area (and ultimately into the surrounding ambient environment) there must be a temperature gradient within the motor, and between it and the environment.
Depending on motor size and operating temperature, there can be as much as a 30°C to 50°C temperature difference between the motor's electrical winding and its exposed outermost surface area -- too significant to ignore. The motor's winding has its own dynamic operating temperature and thermal resistance and a thermal time constant that differs from the rest of the motor.
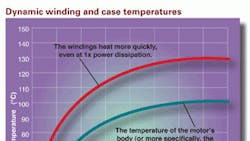
The four measured parameter values (and four-parameter thermal model) for one particular 60-mm-diameter servomotor are shown in Fig. 1. With 1x constant power dissipation, winding temperature begins rising immediately from 25°C ambient temperature. However, the case (and motor body) exhibits a temperature-rise time lag. As we'll explore shortly, this lag in central to the limitations of temperature sensors used for protection against overheating -- particularly if the sensor isn't attached directly to the winding.
For our 60-mm servomotor, winding temperature ultimately stabilizes at its rated 130°C maximum continuous value; case temperature stabilizes at 100°C when surrounded by 25°C ambient air temperature. However, this 30° gradient presents another problem: Where should temperature sensors be installed, and what type should be used? On-winding installation may seem best, but as we'll detail, this arrangement exposes the system to nuisance shutdowns.
Page 2 of 3
In any case, consider Fig. 2: Our 60-mm servomotor with 1× continuous power dissipation shows that a winding temperature rise calculated by the four-parameter model does indeed rise faster than that from the two-parameter model. However, both curves converge at the rated 130°C maximum continuous winding temperature.
In fact, this is a feature consistent between the two models for 1× continuous power dissipation … which means that the simpler two-parameter thermal model provides reasonable accuracy in dynamic winding temperature estimation so long as power dissipation inside the motor doesn't exceed its 1× maximum continuous value.
In real applications, that's not the way servomotors typically operate. Instead, servomotors rated for heavier-duty applications are often commanded to produce dynamic motion profiles that include time periods calling for 2× or even up to 4× peak torque output.
Fig. 3 compares the winding's dynamic temperature rise for both thermal models — only this time we assume 2× peak torque output corresponding to 4× power dissipation in the motor's electrical winding.
With 2× peak torque output and 4× power dissipation, the four-parameter model shows the winding temperature rises to its rated 130°C value in 140 seconds while the two-parameter model lags behind, predicting a winding temperature of less than 80°C a significant and unacceptable difference. Experiments verify this error.
Once power dissipation exceeds the 1× maximum continuous value, the two-parameter model becomes very inaccurate and the dynamic temperature difference between the two thermal models worsens with increasing power dissipation.
See Fig. 4. Dynamic winding temperature during heatup for both models shows our motor producing 4× peak torque, corresponding to 16× power dissipation in the motor's electrical winding. Notice how with 4× peak torque output and 16× power dissipation, the four-parameter model predicts winding temperature to 130°C in only 25 seconds while the two-parameter model lags and underestimates the temperature at 62°C.
Sensor limitations
As mentioned, temperature sensors are commonly used to prevent overheating and ensure that motors remain UL 1446 compliant. To this end, some manufacturers install temperature sensors or switches inside the motor that cut power from the drive when the winding approaches its maximum allowable hotspot temperature. However, switches often can't react quickly enough to compromised situations and hotspot temperature surges.
Therefore, to protect windings from overheating during all possible modes of operation, some manufacturers install the sensors and (space permitting) attach them directly to the windings. These temperature sensors then signal the drive when a winding's dynamic temperature reaches its maximum allowable value; in turn, the drive is supposed to shut off power supplied to the motor. Sometimes, manufacturers even place temperature switches in series with each phase of the motor's multi-phase electrical winding in compliance with the UL 2111 overheating protection standard.
Page 3 of 3
However, new research shows that even a temperature sensor attached directly to a servomotor's electrical winding won't always protect the motor from overheating.
Reconsider the four-parameter estimation of winding and case heatup at 1× power dissipation.
Shown in Fig. 5 is the dynamic heatup of both — only this time, the motor generates 4× peak torque output, corresponding to 16× power dissipation.
Here, the four-parameter model calculates that with 4× peak torque and 16× power dissipation, winding temperature rises rapidly from 25°C ambient to its 130°C rated value in only 25 sec. Meanwhile, the case temperature only rises to 30°C. In effect, for 16× power dissipation, winding heatup is adiabatic with little heat power transferred to the case during the first 25 sec.
In the next 70 sec, the winding approaches 280°C and is now in the process of burning up while the case has barely reached 40°C. In contrast, if one uses the two-parameter model to calculate the entire motor's dynamic temperature rise, the windings are inaccurately estimated at less than the 130°C rated value at 70 seconds.
Sensor limitations
Servomotor manufacturers must decide on what type of temperature sensor to use: thermocouple, thermistor, or temperature switch. Along with the drive, this sensor is supposed to protect the motor from overheating during all possible modes of operation — but not cause nuisance motor shutdowns.
Many commercial drives only interface with temperature switches and not thermistors or thermocouples. In addition, most modern drives use the pulse width modulation (PWM) to produce output voltage and current … and PWM drives are electrically noisy. Here, accurately measuring dynamic winding temperature with a thermocouple is difficult, due to this electrical noise. For these reasons, many servomotors contain either a temperature switch or a thermistor mounted inside the motor.
Location
Where are temperature sensors best installed inside a motor? The four-parameter thermal model shows how motor windings heat fastest, which might suggest that sensors should be mounted on motor windings.
Consider this: Many manufacturers tout UL 1004 and CSA 22.2 adherence for their motors. To meet these standards, electrical insulation must be constructed in compliance with the UL 1446 Insulation System Standard. As described in UL 1446 Section 4 and Table 4.1, the winding's maximum allowable hotspot temperature, occurring at any point and time, is determined by the insulation Class used to construct the winding. Therefore, to comply with UL 1446, a winding's insulation must have a maximum hotspot temperature equal to or greater than the maximum continuous winding temperature.
To provide an over-temperature safety margin during peak torque output, it makes engineering sense to construct motor windings using a higher Class insulation such that the winding's maximum hotspot temperature is never exceeded, or UL 1446 violated.
To keep a servomotor in compliance with UL 1446, shouldn't the temperature sensor also be placed at the point in the motor's electrical winding where its hotspot temperature occurs? In fact, this isn't always possible, especially in smaller 20 to 90-mm-diameter servomotors. As mentioned, many servomotor drives only interface with temperature switches, such as a Thermik SO1.
Given the physical size of a temperature switch and the packing density of these motors' electrical windings, manufacturers often attach the switches to winding end turns. However, the end turn doesn't always correspond to the winding's hotspot location.
In fact, in many 20 to 60-mm diameter-servomotors, manufacturers locate the temperature switch inside the motor but (due to physical size of both the switch and the winding) this “normally closed” switch isn't attached to the winding at all, so the winding's dynamic temperatures are not measured directly.
Other servomotor manufacturers also specify motors with Class B (130°C) or Class F (155°C) insulation but specify 130°C or 155°C as the maximum continuous winding temperature. In addition, they can specify 4:1 or even 5:1 as the peak to continuous torque ratio, though this provides no safety margin between the winding's maximum continuous and its maximum hotspot temperature.
Four-parameter thermal model plots show how a servomotor's electrical winding heats up most quickly. As motor peak torque output increases above the 1× continuous value, the dynamic temperature difference between the winding and case becomes increasingly greater … and above 2× peak torque, the initial winding heatup is adiabatic and the rise in case temperature lags behind.
Therefore, with no safety margin between the winding's maximum continuous and its hotspot temperature actual measurement shows that for greater than 2× peak torque output, it's extremely difficult (if not impossible) for a motor temperature sensor not directly attached to the winding to react quickly enough to prevent (with the drive) exceeding winding maximum hotspot temperature — and violating UL 1446.
Even if a temperature sensor is attached directly to the windings, it may not be at the winding's hotspot location. Here, the temperature gradient common in servomotor windings can prevent the temperature sensor from detecting the dynamic rise in hotspot temperature fast enough to prevent the maximum allowable value from being exceeded — and UL 1446 from being violated.
A full list of references and supporting documents is available from the author at [email protected]. For more information, call (952) 368-3434 or visit exlar.com.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: