How to Customize Magnetic Rotary Encoders with Online Configuration, Software, and Microprocessors

Rotary encoders measure the rotation of machine shafts and report the results to electronic controls. They are used to track the spinning of motors, shafts, and joints in robots, packaging and material-handling machinery, and construction and military vehicles.

The most common are incremental encoders, which send signals to controls each time its shaft (connected to the motor shaft) rotates a certain amount. Incremental encoders let machines accurately monitor acceleration and rapidly respond to changing loads. In contrast, machine axes that position mechanical components usually use absolute encoders. Absolute encoders report angular shaft position anytime controls request it. Encoders with multiturn capabilities keep track of complete rotations. That’s useful in robotic arms, packaging machinery, and construction equipment that must accurately position mechanical linkages.
Optical encoders, most common in applications that need precise measurements, use code discs that intermittently intercept a light beam shining on photoreceptors. The light pattern that falls on the sensor array indicates angular position. They are fast and accurate, but code discs can break under shock and can collect dust and condensation that impede operation. Code discs also need large diameters, up to 50 mm, for good resolution. Optical encoders that track multiple revolutions typically use secondary code discs geared together, which is effective but delicate and mechanically complex.
This file type includes high resolution graphics and schematics when applicable.
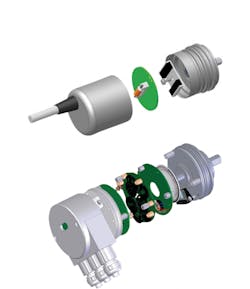
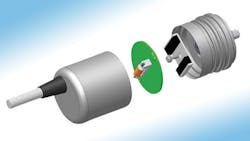
In contrast, magnetic encoders use arrays of Hall-effect sensors to measure the orientation of the magnetic field emanating from a permanent magnet fastened to the shaft. A microprocessor interprets sensor signals to calculate the rotational angle of the magnet and shaft. Mechanical simplicity makes magnetic encoders smaller and more durable than optical encoders.
What’s more, Hall-effect sensors are mass-produced for the automotive market (where they’re used in antilock brakes), so magnetic encoders are relatively inexpensive. Two caveats: Early-generation magnetic encoders using Hall-effect sensors and signal-processing circuits have less precision and slower dynamic responses than optical encoders. Magnetic encoders are also sensitive to electromagnetic interference.
Some magnetic encoders supplement operation with signal collection and microprocessors to let them act as incremental encoders. Such encoders include a Hall-effect sensor containing four elements that generate four analog outputs. These raw signals go to analog-to-digital converters so signal-processing software can use the data for feedback.

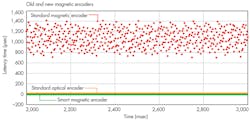
The software includes filters and velocity-compensation algorithms to get accuracy to within 0.1° and resolution that’s four times better than traditional encoders with integrated Hall-effect sensors and signal processing. Compared to traditional magnetic encoders, microprocessor-driven encoders have lower latency — the time between when controls trigger measurement and results are available. They also compensate for temperature variations and errors from thermal drift.
Microprocessors (32-bit) let users program encoder settings such as pulses sent per revolution. That lets OEMs program one incremental-encoder model to emulate the performance of several legacy encoders. Users can “tune” the encoders to meet specific requirements, and retail distributors can tailor operating characteristics without having to stock lots of encoder models.
Multiturn Wiegand counter
Hall-effect sensors measure rotations from 0 to 360° but don’t on their own track multiple revolutions. An electronic revolution counter running on a power source usually does that task. But if mechanical movement takes place when electrical power is unavailable, the encoder can fail to register complete rotations and lose track of absolute position. Then there’s little alternative but to return the machine to a known start position and rezero the counters.
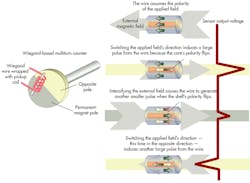
Another type of revolution counter uses energy harvesting based on the Wiegand effect, the current generated by two-layer ferromagnetic Vicalloy wire when subject to a magnetic field. This wire, made of cobalt, iron, and vanadium that’s cold-worked and hardened to hold a crystalline structure, exhibits high magnetic hysteresis when subject to a sufficiently strong magnetic field, and magnetizes. If the direction of the external magnetic field changes (due to rotation of nearby permanent magnets, for example) the wire’s magnetic polarity initially stays the same but “flips” when the change in the external field reaches a critical threshold.
In encoders with Wiegand-based coils that count multiple revolutions, this change in magnetic polarity generates a current pulse in a copper coil wrapped around the Wiegand wire. As the external field continues to rotate, the wire’s polarity eventually flips back, generating a second pulse. These pulses provide enough power to activate the rotation-counting circuit.
Encoders with Wiegand-based coils track multiturn absolute position don’t need an external power supply. The counting electronics are nearly always in a dormant state, except when the shaft moves enough to trigger a polarity flip in the wire. Electronics analyze the rotating direction and record the revolutions. In this way, encoders with Wiegand-based coils avoid the disadvantages of encoders that run off batteries — including limited lifespan, extra weight, and substances that complicate disposal. The all-electronic counter also eliminates the need for gears used in most optical encoders.
With the Wiegand-wire encoder, pulse intensity is independent of rotational speed. Voltage across the pickup coils consistently lasts about 10 μsec, which makes it easier for electronics to consistently register.
In contrast, simple dc generators generate electrical energy from mechanical rotation, but output current from these devices depends on the rotational speed. If rotation is too slow, the generator output will not power the electronics.
No matter the additional functions, magnetic encoders retain mechanical simplicity and robustness.
Rugged encoders for tough Jobs
Rugged models feature stainless-steel housings, heavy-duty bearings, and IP69K-rated shaft and connector seals. The encoders resist dirt, moisture, heat, shock, and vibration. This makes them useful in mining, construction, agricultural, and military machinery. Hardy magnetic encoders also withstand the aggressive cleaning common with food-processing equipment. Housing options include explosionproof variants that meet ATEX/IECEx requirements for situations with potentially dangerous levels of flammable gases or dust.
Sensors in the newest encoders are compact and self-contained, making it simple to adapt encoders to various mechanical configurations. With modular encoders, those with interchangeable features, designers can specify housing type and material, shaft type and diameter, mounting flange type, level of protective sealing, and electrical connectors. Modular encoders also come with any number of electronic interfaces, including serial (SSI), parallel, analog, CANopen/DeviceNet/J1939, fieldbus (Profibus, Interbus). Interfaces for industrial Ethernet (EtherNet/IP, Profinet, Powerlink EtherCAT) are on the horizon or in some cases are already here.
How to customize encoders
Designers traditionally buy encoders through sales agents who track which features are technically feasible. Under this setup, questions about whether an encoder can be manufactured as specified can only be settled by a call to the manufacturer.
But some manufacturers now make shaft-mounted encoders and sell “industrially customized” versions of them online for technicians and international distribution partners to configure encoders to exact specifications. Databases contain datasheets and technical drawings. Online product wizards only display valid encoder-feature combinations. Such online options, plus modular encoders, let designers combine subcomponents to specify more than 100,000 different absolute or incremental encoder variations. | Read more at the Posital-Fraba website.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: