Dexterous Robotic Finger Prototype Withstands Physical Impacts

When robots work in unstructured environments, the physical impact of bumps and collisions can be inevitable. The impact can damage the robots’ hardware systems. This is often the case for rigid multi-fingered robotic hands.
A team of researchers who recognized the need for dexterous robotics hands that can withstand physical impacts in environments, have designed a robotic finger than can absorb physical impacts in their working environments,
The research team from Harbin Institute of Technology (China) have created a solution that mimics the human finger in dexterity and its ability to contend with physical impacts during their interactions with humans and objects.
“This will enable the dexterous hand to have better mechanical robustness, thus solving the problem that the rigid driven dexterous hand is easily damaged by physical collisions in unstructured environments,” said Yiwei Liu, a professor at Harbin.
The Problem with Robotic Hand Design
Currently, variable stiffness actuator systems are go-to technology in robotic hand design. Likened to a human body, they provide dexterity and flexibility or stiffness, depending on the task performed.
The researchers explained that variable stiffness actuators are driven by two actuators, which also necessitates the use of two sets of decelerators, actuation devices and sensors. The additional components in the current cable-driven design increase the weight and volume.
Variable Stiffness Actuator Principle
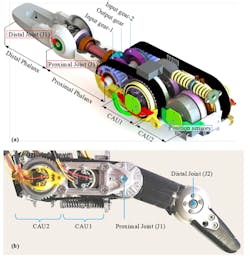
The research team have instead developed an “antagonistic variable stiffness finger mechanism” that is based on achieving mechanical passive compliance against physical impacts. In this solution, the robot finger is based on gear transmission. “The mechanically robust finger is based on the concept of mechanical passive compliance, where the contact forces between a robotic manipulator and a stiff environment are controlled,” noted the researchers.
The researchers tout several advantages for new robotic finger design in this experimental study: The mechanical fingers are more reliable and easer to manufacture than current designs. The fingers absorb physical impacts while adjusting its stiffness based on the requirements of the task. In addition, the finger mechanism is compact and does not have the weight and complexity of additional actuators.
Getting a Grip
The finger prototype weighs 480 grams and was fabricated with alloy material and 3D-printed material. The finger is described as robust in withstanding physical impacts and performs well for power, grasping and manipulation, according to the paper published in the journal Frontiers of Mechanical Engineering.
Next steps are to improve the finger’s stiffness adjustment range, and make it more compact in size and weight. But the ultimate goal, the authors noted, is the design and fabrication of a complete dexterous hand.
“This research is of great importance to improving the manipulation level of dexterous hands in unstructured environments or physical interacting tasks,” said Liu.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: