Key Component Integration for High-Performance Robotic Joints
At a Glance
Rather than designing your own robotic joint by purchasing a series of components, integrating them to provide their best features and coming up with a mounting structure that takes into consideration the benefits of each component, robotics designers are finding it easier and more cost-effective to simply implement a single subassembly as a solution.
Robotics have infiltrated most industries, including packaging, assembly, machining, medical and many more commercial and industrial applications. The majority of these applications are for small, lightweight systems such as industrial in-line robots, surgical robots and cobots. When designing for such applications, design engineers are tasked to focus on compactness without losing the precision and load-bearing capabilities needed for specific tasks.
These challenges have led manufacturers to consider ways to integrate multiple components into a single installed unit such as robotic joints. Such packaged solutions have allowed for very small footprints, particularly when compared to the alternative that includes a separate motor, gearbox and encoders that must be purchased and mounted together.
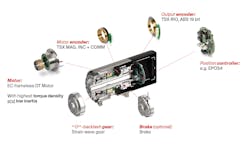
To provide the best possible product for robotic joint systems, maxon has designed and manufactured their high-performance joint (HPJ) line of robotic joint modules. These integrated devices consist of an EC frameless DT motor, a strain wave gear, a motor encoder, an output absolute encoder, an optional braking device and a high-accuracy position controller board.
EC Frameless Motor
Frameless motor components are designed for high-torque applications. Each includes an electromagnetic stator and permanent magnet rotor that operate like a conventional, synchronous motor. These motors are used to drive a high-ratio gear set and possess higher pole counts that are able to increase torque output. Large through-holes allow for optimized packaging, and allow the user to incorporate cameras, sensors or cabling for other devices.
The EC frameless motors offer a very low profile, which makes them ideal for robotic joint applications. The HPJ line of high-performance robotic joints offer nominal output speeds from 10 rpm to 35 rpm to handle a wide range of operations. Maximum possible output speeds based on the use of a 48 VDC supply are in the range of 15 to 65 rpm. The use of a frameless motor in the HPJ line eliminate cogging during slow speeds, which delivers fine, smooth and predictable motion inside the robotic joint system.
maxon’s EC line of brushless motors delivers the performance and long-life capabilities required in the robotics industry. Frameless motors not only offer increased performance in a compact package, but offer more flexibility in shaft and bearing selection when compared to a traditional motor.
Strain Wave Gears
Position and movement play hand-in-hand in a robotic joint application. Robotic joints encompass varying reflective loads and inertia depending on position, which continues to change throughout an operation. Gear reduction permits the use of smaller motors that further require less power and provide higher efficiencies. To provide these benefits while maintaining zero backlash in the system, maxon incorporates strain wave gearing as part of the HPJ module.
Strain wave gears consist of only three main parts: a circular spline, a flexible spline and a wave generator. The wave generator rests inside the flex spline, which forces the flex spline into an elliptical shape that causes the teeth of the flex spline to engage with the teeth of the circular spline at two opposing regions across the major axis of the ellipse. Because the gear teeth are always fully engaged, these gearheads produce zero backlash as well as the high torque capacity that robotic joints require. The strain wave gearbox is compact and lightweight and provides superior position accuracy and repeatability.

Dual Encoder Design
The maxon high-performance joint modules are equipped with two positioning encoders, one mounted on the input for commutation and one on the output for positioning. Encoder feedback for the motor drive enables the system to offer smooth velocity trajectories to the user while providing the ultimate in motor efficiency. The maxon TSX 50 MAG is an incremental encoder with two channels and provides 2,560 counts per turn.
For the output encoder, the HPJ Modules incorporate a TSX RIO absolute encoder with 21-bit resolution. As one of the more critical components of the robotic joint modules, the output encoder is responsible for the precision of the joint itself. In a variety of applications, it is critical that the robot controller rely on the output encoder as a way to compensate for various levels of deflection that can occur as a combination of all the joints as they work together.
The absolute encoder maintains precise location of the joint even during the loss of power—homing is not necessary. Other challenges in precision could be environmental, including temperature or humidity variations that could affect each joint’s movement differently. The absolute encoder provides the necessary feedback to the controller to mitigate these variations as well.
Braking Option
Robots used in a variety of applications may require a braking system to provide holding torque once an operation is halted. Braking systems are essential when an operation requires that the robot joint holds position when power is lost or a signal is interrupted.
This can be during an emergency situation where a person has stepped into the line of movement for the robot, if a tool gets in the way of an operation, or while the robot is performing a series of stop and go movements such as in a material handling, inspection or surgical operation. In keeping with other components used inside maxon’s HPJ modules, the electromagnetic brake is compact and lightweight.
Position Controller
Usability is key when incorporating a robotic joint solution. On board electronics for maxon’s HPJ57 modules are delivered through a ready-to-connect high-performance EPOS4 positioning controller. Integrating the motor control electronics inside the HPJ module delivers significant benefits, including speed and torque control for precision positioning, command of brake engagement and disengagement when needed, EMI and RFI shielding, and communications through EtherCAT and CANopen. Integrated control electronics means reduced wiring costs as well.
These controllers are designed using cutting-edge technology and manufacturing techniques. The EPOS4 controller board is suitable for efficient and dynamic control of brushed DC motors as well as the BLDC (EC) motors used in the robotic joint modules. EPOS4 is a modular, digital positioning controller that provides superior control performance, extremely high-power density and up to 98% efficiency. The board is equipped with temperature monitoring capabilities and is shock and vibration-resistant.
Conclusion
High-performance robotic joint modules, such as maxon’s HPJ57, are compact, low-profile robotic joints configured for lightweight applications. Offering the highest power density and most efficient operation in a single unit, the HPJ modules are ideal for cobots, surgical robots, and small in-line manufacturing applications. All individual components for each HPJ product are fitted to work together seamlessly and with the utmost precision.
Biren Patel is head of business development, maxon precision motors, inc.
About the Author
Biren Patel
Head of Business Development, maxon precision motors, inc.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: