BionicANTS Work Together in Swarm Artificial Intelligence

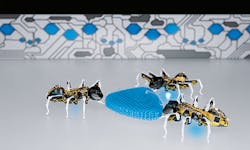
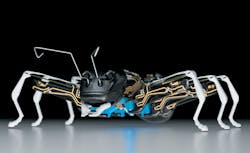
Festo’s bio-inspired BionicANTS robots, which replicate the form and function of worker ants, are the company’s latest entries into the Industry 4.0 movement and robotic revolution. They embody the main themes of swarm artificial intelligence (AI), acting autonomously while communicating and collaborating with the other ants to devise a strategy to reach a final goal. In addition, the BionicANTS feature 3D-molded interconnect device (3D MID) technology on 3D-printed structures. Festo also incorporates non-conventional use of piezo-ceramic actuators mechanically coupled with hinges for motion in miniature robotics.
External circuitry

The legs and body of the BionicANTs are 3D-printed via selective laser sintering (SLS) with a polyamide powder. As 3D MIDs, they feature laser-etched conductive tracts for compact functionality. Festo received the 2015 MID Innovation Award from the Research Association Molded Interconnect Devices 3-D MID e.V., for its design and use of 3D MID technology on 3D-printed parts.
âFesto employs a laser-direct-structuring (LDS) machine to laser-etch the tracts and apply conductive metal coatings of gold, nickel, copper, or a mix. The external circuitry adheres to the curves of the ant’s body segments, eliminating the need for bulky wiring, since components can be directly soldered to the devices at the intended terminals. Minimal internal circuitry is needed, contributing to the compactness of the design. Read more about Festo’s 3D MID process here.
Algorithms and Communications

Each BionicANT works as a component of a multi-agent system (MAS) to perform heavy lifting-and-carrying tasks. They are programmed according to a distributed catalogue of rules created from mathematical model-building and simulations. These regulation algorithms govern their motions and enable the ants to alter their behavior as a response to environmental cues and RF signals generated by the other ants. For example, a simple regulation algorithm prevents collision by ensuring that the ants do not try to occupy the same space.
Communication generates from the RF chip in the ant’s posterior body segment. Also located on the posterior segment is a Cortex-M4 microprocessor (MPU), which processes RF signals and environmental cues. In addition, the MPU sends voltage signals to the piezo-actuators in the pincers and legs.
The Amazing Collaboration of Ants In Nature
Worker ants are iconic for their focused mannerisms and efficient teamwork, using pheromones to communicate with other workers in the colony. Their ability to work as a single unit to fulfill tasks is the inspiration for research and has led scientists to describe ant colonies as “super organisms,” where the actions of individual organism are subordinate to a common task. (Read more at ASU school of life science and Discovery.) For example, research at the Georgia Institute of Technology showcases the dual properties of an ant colony, where ants coordinate their behavior to act as a thick liquid or solid in response to different situations. Scientists on the team even measured the change in viscosity and resilience under different stimuli. (The GIFs below are from a video by the New York Times.)
Visual Sensing
A complex system of algorithms allows the ants to process visuals, using landmarks in the arena to indicate location. It employs a stereoscopic camera to generate two images at different angles, similar to the way our eyes work to process a 3D visual. Thanks to camera sensing, the ant can locate the object targeted for transport and process landmarks; it then uses RF signals to communicate this data to the other ants. In addition, a laser sensor at its abdomen senses the texture of the floor beneath it to determine location, walking speed, and proximity.
Piezo-ceramic Mechanically Coupled Hinges
The legs and pincers employ piezo-ceramic bending transducers that are soldered to the external circuitry and coupled with hinges to enable powerful walking and grasping movements. The piezo-ceramics provide a quick response to increased voltage signals by contracting and bending for further activation of the hinge. They serve as compact local transducers for movement. In the pincer, two piezo-ceramic bending transducers mechanically induce motion of the gripping jaws. In the legs, three local piezo transducers respond to voltage signals for forward/backward and up/down motions. The ants use 8.4-V rechargeable lithium-polymer (LiPo) batteries and transformers are used to generate 300 V for piezo actuation.
Conclusion
The ants demonstrate decentralized intelligence, equally contributing to arrive at a strategy to move the object. They even walk themselves to a recharge station when they detect low battery life for fully autonomous performance. By applying similar technologies used in the autonomous and collaborative robots, perhaps every automated factory floor can buzz with the efficiency of worker ants.
About the Author
Leah Scully
Associate Content Producer
Leah Scully is a graduate of The College of New Jersey. She has a BS degree in Biomedical Engineering with a mechanical specialization. Leah is responsible for Machine Design’s news items that cover industry trends, research, and applied science and engineering, along with product galleries. Visit her on Facebook, or view her profile on LinkedIn.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: