Rubbery, Stretchable Semis and Sensors Meet Robotic-Hand Needs
It’s possible to make silicon and semiconductors somewhat flexible by using a super-thin substrate, but this brings performance issues and has other limitations. A team at the University of Houston has instead gone the "full stretch" by creating rubbery semiconductors including integrated electronics, logic circuits, and arrayed sensory skins (Fig. 1). Applications include robotic and "smart" skins gor gesture translation of sign-language alphabet and haptic sensing for robotics, as well as bioelectronics.
1. By using a specially infused rubber-like polymer substrate plus an ion gel, researchers developed highly flexible semiconductors and sensors. (Source: University of Houston)
The researchers combined their rubber composite (polydimethylsiloxane, PDMS) as a stretchable semiconductor with silver nanoparticles having conformally coated silver nanowires (AuNP-AgNW) dispersed within the PDMS as a stretchable conductor. An ion gel was used as a gate dielectric.
One additional benefit of their approach is they didn’t need to create a unique material, which would involve sophisticated molecular design and synthesis. Instead, all of the materials they used are commercially available and can be easily manufactured and have stable performances. They were able to greatly increase carrier mobility by providing fast paths and, therefore, a shortened carrier transport distance.
Some of the efforts were focused on individual transistors detailed in their academic paper “Rubbery electronics and sensors from intrinsically stretchable elastomeric composites of semiconductors and conductors” in AAAS Science Advances (with extensive references at the end), as well as in-depth Supplementary Materials. However, work was done on using this technology to create sensors for strain, pressure, and temperature.
For example, they constructed a strain sensor as a channel with a length and width of 50 mm and 5 mm, respectively, and thickness of approximately 100 nm (Fig. 2). The electrical resistance of the sensor increased as it stretched. When the applied strain was along the channel length direction, the resistance increased from 0.3 to 4.6 GΩ; an approximately linear increase of resistance was obtained upon mechanical stretching.
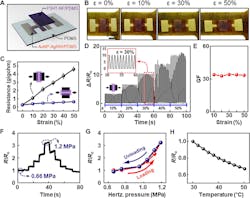
2. Rubbery strain, pressure, and temperature sensors: Exploded schematic illustration of the strain sensor (a); photographs of the sensors under different levels of mechanical strain (b); measured electrical resistance of the strain sensor under different levels of mechanical strain along the channel length direction (black) and perpendicular to the channel length direction (blue) (c); relative change of the resistance (ΔR/Ro) under cyclic stretching and releasing (d); gauge factor GF of the strain sensor with respect to the different strain (e); relative electrical resistance (R/Ro) change of the pressure sensor with respect to time under different levels of pressure (f); relative electrical resistance change of the pressure sensor under a loading (red) and unloading (blue) cycle (g); relative electrical resistance change of the temperature sensor with respect to the different temperature (h). (Image source: University of Houston)
For a real-world, more-tangible demonstration of the potential of the stretchable electronics and sensors, the team outfitted a robotic hand (Star Wars Science, Darth Vader robotic arm) with temperature and pressure sensors placed on the phalanges instead of the joints of the fingers, to avoid coupled output from the finger motions (Fig. 3). This artificial skin can provide capabilities such as gesture interpretation and haptic sensing for robots. The strain sensors directly translate a gesture into an electrical parameter such as resistance to provide data for understanding of sign language, among other applications.
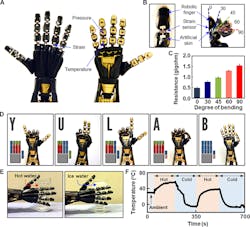
3. Intrinsically stretchable rubbery electronics–based robotic skins: Photographs of a robotic hand with intrinsically stretchable rubbery sensors (a); photograph of strain sensors located on the hinges of a robotic finger (left, top view) and overlapped photograph of the robotic finger with different bending angles from 0° to 90° (right, side view) (b): electrical resistance of the strain sensor under different degrees of bending (c); demonstration of using an array of strain sensors on a robotic hand to translate sign language alphabets (d). The inset schematics of the colored hand are electrical resistance values that correspond to hand gestures (see the Supplementary Materials and figs. S11 and S12 for details). Photographs of the robotic hand with the temperature (e). (Source: University of Houston)
Lead researcher Cunjiang Yu, a Bill D. Cook Assistant Professor of Mechanical Engineering, said that the next steps will involve further increasing the carrier mobility and building more complex hierarchy and high-level integrated digital circuits.

About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: