Optimizing Pick-and-place with Cartesian Robots

Moving an object from one location to another—picking and placing—is an ideal application for industrial robots due to the robots’ repeatability, throughput and favorable return on investment. It is hard to imagine modern automated systems from on-machine pick-and-place to palletizing without industrial robots removing these repetitive tasks from the hands of humans.
360 Market Updates projects that the estimated $2.7 billion pick-and-place robotic market of 2023 will increase to $5.8 billion by 2031, a compound annual growth rate (CAGR) of 16.5%. Meticulous Research is even more bullish by predicting robotic pick-and-place at a 23.9% CAGR 2023 to 2030.

This article explores pick-and-place and the role that Cartesian robots play in these applications. Part 1 describes the unique characteristics of Cartesian robots. Part 2 compares Cartesians with six-axis articulated robots, including cobots, SCARA and Delta robots in pick-and-place applications. Part 3 wraps up with the best use cases for Cartesians.
Part 1: What is a Cartesian Robot?
Cartesian robots are linear robots because the principal axes for control are linear as opposed to rotary. Three axes mounted at right angles are often referred to as a handling system, multi-axis handling system or gantry robot. Each axis is driven by a servomotor. When there are two X axes as shown in the below image, one axis is the primary and the other is the secondary. The primary and secondary axes are often coupled with a rigid connecting rod, though in smaller systems the Y axis itself may mechanically couple the two X axes together.
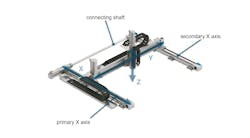
Each axis has a cable management system with energy chain and tracks that hold the chain in place. There are adjustable mounts making sure the X axes are mounted flat and parallel on the machine. Rotary motion (clockwise or counterclockwise) is provided by a servomotor and rotary module mounted on the Z axis. Suction cup and gripper end-of-arm tools are the same as those found on any robot for pick-and-place. A notable feature of Cartesian robots is that they deliver consistent precision, capacity and speed across the entire workspace.
Part 2: Comparison of Industrial Robots
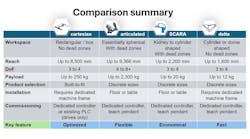
A common pick-and-place application involves moving items from one conveyor to the next. Because the Cartesian robot and the Delta robot are located above the workspace, the two conveyors can be side by side. The conveyors must be separated for the articulated and SCARA robots to accommodate their bases. The articulated robot’s potential area of motion extends beyond the workspace, and that is why articulated robots require guarding. Cobots offer a circular workspace without guarding when operated in safe mode and with guarding when not.
As shown in the illustration above, the Cartesian robot workspace is a rectangular box with X, Y and Z dimensions. The Cartesian robot can pick-and-place everywhere within the box. An articulated six-axis robot’s workspace is circular, with a dead zone in the middle near the base where the robot cannot reach or do any work. SCARA robots offer a kidney-shaped workspace, and if they can reach behind themselves, more of a circular space with a similar dead zone near the base. Delta robot’s workspace is circular with no dead zone.
Reach Within the Workspace
If the reach required within the workspace is up to 5.2 ft (1.6 m), all four robot types can accommodate that reach. If the workspace reach extends beyond 7 ft (2.1 m), then only Cartesian or articulated robots can be applied. If the application requires picking on one level and placing at another level, then all four can accommodate a level difference of 2 ft (.6 m). If the distance exceeds 5 ft (1.5 m), then Cartesian and articulated need to be applied. If the need is picking and then placing at a 90 deg. angle, the articulated robot can perform this action out of the box. The other three require special end-of-arm tooling. For any angle greater than 90 deg. only the articulated robot can accommodate.
Payload
Payload is calculated by the mass of the tooling plus the mass of the workpiece. Delta robots can accommodate on average up to a 26 lb (12 kg) payload. SCARA can accommodate a payload on average up to 44 lb (20 kg), while cobots typically top out (although this is changing all the time) at up to 77 lb (35 kg). Cartesians can go up to 551 lb (250 kg), and the largest articulated, at the time of this writing, up to 5,000 lb (2,300 kg).
READ MORE: Moving Motors Stretch the Possibilities of Long-Travel Motion
Articulated, SCARA and Delta robots are sold in discrete sizes. The design engineer may find that the payload of a model is ideal, but the reach or speed is not sufficient. The recourse is to buy a larger unit that has more capacity than needed. Discrete sizes often result in excess capacity, size and cost.
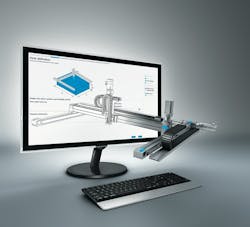
On the other hand, Cartesian systems are built to fit the requirement. Each axis in terms of length, load and speed is individually specified. The machine builder does not purchase excess capacity. This means that the pick-and-place can have a small workspace with a heavy payload or the same workspace with a light payload. There are online productivity tools from suppliers that allow an engineer to design a perfectly sized Cartesian robot in a matter of minutes using only application parameters. The robot arrives as a ready-to-assemble kit.

The SCARA’s key feature is economical. If the pick-and-place can be accomplished with a SCARA robot, then it is probably going to be the least expensive option. SCARA robots are good at precise, high-speed picking and placing of small parts.
Delta robots are fast. If the workspace is small, the parts light and the action required quick, then a Delta robot may be the best choice. Typically, Delta robots are the most expensive. Make sure the requirement requires the high throughput of a Delta robot.
Part 3: Best Use Cases of Where, When and Why to Use a Cartesian Robot
Cartesians are built to fit. When there are custom lengths for each axis, the Cartesian will provide the right capacity.
It is impossible for a Cartesian to move out of its workspace so guarding is often unnecessary. No guarding, or limited guarding, reduces footprint and cost as well as making installation easier. Because payloads can be light to heavy, Cartesians can be applied in high-speed, small-parts pick-and-place as well as in heavy-duty palletizing for an extended range of applications. With a Cartesian, there is uniform speed, capacity and accuracy within the entire workspace. Cartesian robots are ideal for space-constrained applications where floor or table space is at a premium. Machine builders can generally find room above or to the side to use a Cartesian for pick-and-place.
Because they are mounted above the workspace, the Cartesian and Delta robots must be built on a dedicated machine frame specified to the dimensions of the robot. Articulated and SCARA robots will fit on the floor or table. Larger articulated robots will need to have structural features added for mounting.
Commissioning is another way that Cartesian robots differ. Every articulated, SCARA and Delta robot comes with a robot controller. Buy three robots, for example, and the machine builder receives three controllers. Cartesian systems can also be built with a controller, but because of their ability to move linearly without sophisticated kinematics, they can be operated with the existing PLC or an off-the-shelf PLC with motion capability. This means the entire machine code can be inside one controller with no separate controller or software license for that controller.
One Word Sums up Each Robot
If there were only one word to sum up each solution, the word for Cartesian systems would be optimized. Optimized goes back to built to fit—built exactly to the footprint of the machine. The capacity is exactly what is needed. The size of the individual actuators has been set according to the payload needed.
READ MORE: Emergent Robotics: Pioneering Solutions in Modern Industrial Automation
The key feature of the articulated robot is flexible—flexible not only in terms of range of motion but also in repurposing. If one needs an articulated robot with the appropriate reach, payload, and motion profile for a deployment that lasts a few months or years and then has a new need for a robot with a similar capacity, the asset can be redeployed.

In applications where either an articulated robot or a Cartesian can perform the pick-and-place activity, often the Cartesian will be the lower-cost option. Whenever an optimized fit is required or beneficial, such as in a serial machine, Cartesians are almost always worth a look.
When asked to envision industrial robots, most people in the manufacturing field visualize banks of industrial six-axis robots in automotive plants welding, painting or fitting decks or doors. And with the rise of cobots, the image of articulated robots grows stronger. The predisposition to applying articulated robots when robotics are needed can lead to purchasing more than necessary.
“Sometimes a customer will call with the assumption they need a six-axis robot,” a robot integrator said to this writer. “After getting their requirements, we advise them to use a SCARA or a Cartesian robot because it will be a better fit.”
This article was submitted by Eric Rice, product market manager – Electric Automation, Festo Corporation. He currently serves as first vice chairperson of the Motion Control & Motors Technology Sector Board, A3 - Association for Advancing Automation. He can be reached at [email protected].
About the Author
Eric Rice
Marketing Director
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: