Reconstructing Robotics for Modern Day Healthcare

As technology continues to eclipse previous achievements at a pace which seems to happen at an almost singular level, the field of robotics has shown unparalleled opportunities for seemingly endless possibility. When you pair the need for improved medical outcomes and consistent patient care with the ingenuity of the designers behind robotics, you find a niche like no other.
In the United States alone, healthcare spending exceeds $4.5 trillion per year and the costs are only rising. Companies are working to develop the next-generation of robotics platforms that will bring healthcare into a place where the cost-benefit matrix will be mutually beneficial for both patients and healthcare providers alike.
These next-generation machines will require integrating a multitude of technologies to ensure not only proper functionality, but patient safety as well. One of these technologies is used for precision positioning or holding as well as safety redundancy, and is commonly referred to as a holding brake—or more specifically, an electromagnetic brake.
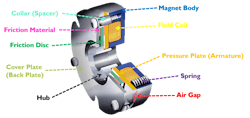
Electromagnetic spring-applied brakes are devices installed on a shaft via a hub that operate using electric voltage to generate magnetic flux to counteract a mechanical spring force which is used to create torque when power is removed from the system. Power-off brakes are disengaged—meaning the shaft is free to rotate—by applying power to the coil and are engaged mechanically via springs when power is removed from the system, allowing the brake to hold the load in place.
Using this fundamental design principle, there are many different variations available based on the application and the need to solve a specific challenge. For example, standard spring engaged brakes are the most common, have multiple coil voltages available and can be designed/manufactured in sizes as small as 8 mm in diameter.

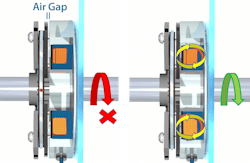
Permanent magnet brakes, on the other hand, utilize independent permanent magnets to counteract and oppose the magnet flux generated when power is supplied to the coil of the brake. Both the permanent magnets and the coil generate their own magnetic fields, so providing electric voltage to the coil will determine the brake’s engagement: No voltage to the coil means the brake is engaged and the shaft will not rotate; voltage to the coil means the brake will be disengaged and the shaft will be free to move.
Because the permanent magnets have such a high holding force, this type of brake has a high torque-to-size ratio as compared to a standard spring-engaged brake, meaning it can be small but powerful at the same time with very low backlash (more on this in a minute).

Understanding How Brake Components Operate Within Robotics Systems
Now that we have a baseline understanding of how some of the critical components within these robotics systems operate, let’s look at where we would find some of the brakes we discussed. It would be difficult to not open with surgical robotics as this field has experienced the most exciting growth within healthcare since the first entirely robotic assisted surgery (RAS) was performed back in 1992. You will find power-off brakes located in multiple positions, from the wheels in the base to the overhead arms, all the way to the manipulators in arms or grippers at the tips.
These brakes can commonly be found on the back of a motor in a sealed system, providing holding torque and an emergency stop function in case of a system-wide power loss. The opportunities within the medical field are quite vast, however, and do not stop within the operating room.
CT scanners and X-ray machines will both have brakes needed to hold and position the patient on a bed, as well as hold the imaging sensors in position during the scan or in the case of a portable system the scanning equipment itself. Hospital or emergency room beds that require multi-axis positioning also have a need for brakes to act as a back-up to prevent the motor from back driving and to keep the bed from falling back to the horizontal plane.
Motorized medical mobility wheelchairs also have electromagnetic brakes installed as a braking system; this is a necessity to properly slow down, stop, and park the wheelchair from moving when in use.

Eliminating Robotics Backlash
When an industry continues to innovate, it forces those around it to follow suit, and thus there have been several innovations in power-off brakes that go hand-in-hand with medical robotics. For example, backlash is a common concern in robotics and the ability to find a way to eliminate it is often a struggle when multiple systems are working in parallel. Backlash in this case is defined as the amount the shaft can still rotate when the brake is fully engaged.
Axial backlash can also be a concern. As you can imagine, while performing robotic assisted surgery, you do not want any “wiggle” while you work. Due to this, advances have been made to eliminate backlash in the two main problem areas: between the hub/friction disc and the interface between the armature/spacers. By using special friction discs and hubs along with customized brake architecture, backlash can be effectively eliminated altogether from the system.
Using PWM to Ease Brake Power Consumption
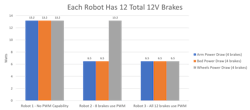
Another large area of concern is power consumption. When you think of all the electronics that go into the development of a robotic system, the power draw adds up quickly, and pretty soon it’s a very big number. To relieve some of that power consumption on the brake side, pulse width modulation (PWM) capabilities have been introduced, which allows the brake voltage to be stepped down an average of 50% (or more) after initial power-on.
For example, a brake using 24 VDC could have its power reduced by 50% by modulating down to 12 VDC, effectively cutting the wattage of the brake in half. This may not sound like much, but imagine having a few dozen brakes in one system; the power savings add up very quickly. Reducing power consumption will also reduce heat generation, which is generally a favorable outcome for the overall system as well. The earlier-mentioned permanent brake technology has an incredible torque-to-size ratio, but it cannot be used with a PWM circuit as it needs a specific voltage operating band for proper function.
The Benefits of a Thinner Profile, Reduced Noise
PWM technology led directly to the ability to produce brakes that have a much thinner profile than ever before, meaning they can be designed to fit in smaller package sizes for more creative solutions to previous size restraints. This style brake can often be found in the joints of a robotic system where axial space is the most critical.
Another popular position is in the wheel motors on the base of the robotic system. The weight of some of these systems requires motorized assistance to move them. Motors in the wheelbase have brakes installed, as well, so as to function as a holding mechanism (and in some cases an emergency brake). Space is very limited, so having a smaller profile is essential.

In some areas of the hospital—e.g., in an operating room—low noise is also very important. Brakes for applications in these areas needed to be developed to function with noise decibel levels acceptable for those environments. By using sound-dampening devices integrated into machined surfaces of the brake itself, the engagement sound of the brake (a metal clicking sound) can be substantially reduced to a more tolerable level and sound.
This style of joint product development comes with working hand-in-hand with those directly familiar with the environment the products would be used in, and is often the critical feedback needed during the product design stages.
Modern spring-applied brake designs have low inertia for rotating components. More specifically, the brake friction discs are exceptionally lightweight and have low inertia. This allows for improved responsiveness from the motor, lower power consumption, smaller designs and longer motor life. By having smaller motors on complex systems, the benefits start to multiply all the way back to the largest joint on a robotic platform.
Because brakes are very commonly installed with a motor on many of these robotic systems, it was only a matter of time before a large bore brake was necessary. These brakes are great for hollow bore actuator systems as wires from the robot can be run right through the brake and to the power source, making it easier to run all the necessary cables without the need for special pathways. Large hollow bore shafted motors are becoming more popular as systems become more compact and designers look for more creative solutions to run all the feedback, system and power cables.

As the industry continues to evolve, the need for engineered solutions will also trend in the same direction. Customized brake products to solve specific application challenges are a viable option and can be a faster solution if teams are engaged early in the design phase of a new program.

To reiterate, patient safety and improved patient outcomes are a huge indicator of success in the medical field, and we can see that even the smallest components in the system are key ingredients to overall success. While the electromagnetic brakes of the system may not be the most well-known part of the system, they are certainly one of the most critical.
About the Author

Craig Harvey
Regional Sales Manager, Ogura Industrial Corp.
Craig Harvey is regional sales manager with Ogura Industrial Corp., Somerset, N.J. This manufacturer of electromagnetic clutches and brakes has a global presence across several major markets and more than 5,000 product designs.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: