Motion Design 101: Servocoupling dynamics
There’s a Japanese saying that the nail that sticks up will be hammered down. Servocouplings were developed when servodrives and positioning feedback got accurate enough to make the backlash of traditional couplings conspicuous.
But servocouplings aren’t only for servomotors; many adjustable-speed drives also require that their positional precision be transmitted properly. Some rotary encoders likewise use miniature servocouplings, as their positioning accuracy is critical and their internal components rarely withstand radial loads caused by even slight misalignment. Beyond less error and lost motion, servocouplings present low mass (best for the rapid accelerations characteristic of servo applications) as well as the ability to damp vibrations, either from the motor or its end-of-arm tooling.
Servocouplings Q&A
Q: Why not make all servocouplings more forgiving of misalignment?
A: Most servocouplings can compensate for about 0.008 to 0.015 in. of parallel shaft misalignment, while especially compliant types far exceed this pliancy. But torsional rigidity is sacrificed for flexibility, since increased radial compliance compromises rotational stiffness. In turn, decreased torsional stiffness pulls resonant frequency down to values more at risk for excitation. In more aggressive servo applications, it may be tempting to oversize for added torsional stiffness. Important not to forget is the proportionate increase in lateral spring stiffness, which is really what needs reduction by flexible couplings to avoid premature bearing failure. Even if a particular coupling holds up under misalignment, it may be inappropriate if excessive restoring forces still act on shaft bearings.
One way to compensate for large shaft misalignments still needing rigidity is with line shafting, which includes a torsionally rigid tube assembled to zero-backlash couplings on either end. While often successful, this can increase the overall coupling length if there’s a lot of system misalignment for which to compensate.
Q: How do different designs handle vibration?
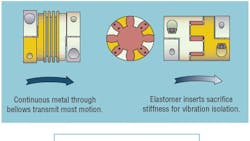
A: If a coupling is made stiff enough, resonance effects can almost be eliminated. But weight limitations sometimes require lighter-weight (or lighter-duty) components — with lower rigidity and more instability — when servo gains are raised. (Reducing coupling compliance often leads to greater material mass, which is why high torsional stiffness relative to size is so important. If we may invent a unit of measure, a higher amount of Nm/rad/kg is normally desirable.) For example, bellows-type servocouplings are used when shaft alignment is kept within fairly reasonable tolerances because they are lightest and most torsionally rigid.
Q: What to do when resonance is a problem?
A: For resonant vibration occurring torsionally or with high-impact loads — which excite all system frequencies — elastomer-insert couplings offer the highest damping without introducing backlash. The couplings typically come in four shore hardnesses, depending on the level of damping required, or the amount of acceptable torsional compliance. Most manufacturers offer 98A, 90A, 80A, and 64D-hardness inserts. The industry standard, 98As though 64Ds, offer increased hardness and consequently torsional stiffness. Other hardnesses are specified primarily for special applications.
While their static torsional stiffnesses are about 50 times lower than those of rigid bellows couplings, elastomer insert couplings always settle to their original angular position, eliminating positioning error. In fact, this is adequate in most cases.
About the Author
Andrew Lechner
Sales & Marketing Manager
R+W is a manufacturer of precision couplings and line shafts for highly dynamic applications. The company is a solution provider for power transmission and motion control industries, plus ISO 9001 certified. The company's safety couplings are TÜV certified. Founded in 1990, today R+W employs over 150 employees.
See Andy Lechner from R+W giving Lee Teschler of Machine Design some tips on the selection and use of bellows and elastomeric insert couplings.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: