EtherCAT enables high-performance motion control
The EtherCAT fieldbus is quickly proliferating because of its deterministic and high-speed update rates, and ability to precisely synchronize network devices. Machine builders and system integrators alike can leverage dedicated motion and machine controller platforms utilizing EtherCAT to construct complete machine controls. In this article, we will discuss the specific benefits of EtherCAT that relate to motion controls.
EtherCAT characteristics — deterministic, fast
EtherCAT is an open, realtime, and deterministic Ethernet fieldbus standard widely regarded as one of the best industrial networks to date. One reason for its growing use is that it's several orders of magnitude faster than Profibus, DeviceNet, and ModbusTCP. Automation equipment manufacturers can use EtherCAT on their own device implementations to improve performance and flexibility, while end users and automation system designers can implement their own EtherCAT-compliant devices. These additional advantages are other reasons why EtherCAT is quickly gaining ground in motion control and automation applications:
EtherCAT speed and deterministic operation
EtherCAT is based on fast “Ethernet on the fly” processing. In a traditional Ethernet network, Ethernet frames (or data packets) are sent to each device; the device then reads the data and sends back a response to the master. This process is repeated for each device in the network until all devices are updated. The total network cycle time is the sum of all the response times and is not deterministic. At times, multiple device messages interrupt one another — requiring the master to arbitrate and organize according to priority and adding delay to the cycle time.
In contrast, an EtherCAT network works more efficiently: A frame is sent from the master and when the first slave device receives the frame, it instantly extracts the data with its address and writes any response data. This means that the frame effectively passes through all the slaves (with negligible delay) and then returns to the master.
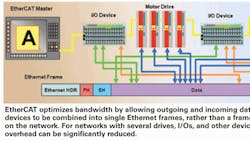
In addition to on-the-fly processing, EtherCAT also optimizes bandwidth by allowing outgoing and incoming data for multiple devices to be combined into single Ethernet frames, rather than requiring a frame for each networked device. For networks with many drives, I/Os, and devices, this approach significantly reduces transmission overhead. It is well suited for high-bandwidth applications such as multi-axis servo machine control. Sampling and updating 64 drives and several I/O devices can be done in less than 250 µsec.
EtherCAT: Tight synchronization
Multi-axis motion control networks heavily depend on the synchronization of independent devices to accurately execute multi-dimensional motion trajectories. Synchronizing all devices on a network requires that transmission times between devices — and drifting of clocks on different devices — be calculated and compensated for. To this end, the EtherCAT standard uses distributed clocks. The phase shift between all distributed clocks is less than 0.1 µsec.
Low cost — EtherCAT takes advantage of the mass-produced Ethernet communication devices and cables used by all PCs to minimize cost. Slave devices require a low-cost dedicated controller.
EtherCAT flexibility
EtherCAT supports a variety of standard application layer implementations, including CoE (CANopen over EtherCAT), EoE (Ethernet over EtherCAT), FoE (file transfer over EtherCAT), SoE (servo drive over EtherCAT), and FSoE (safety over EtherCAT). This allows multiple vendors to make fully compliant devices with the same application implementations. What's more, EtherCAT supports VoE (vendor specific protocol over EtherCAT), which allows vendors to implement their own protocol for very high bandwidth applications. For example, consider a dedicated high-speed multi-axis control platform for which the cost of a standard implementation is intolerable. Some devices can simultaneously support both open standard and proprietary application implementations to provide the most efficient solution while maintaining flexibility.
EtherCAT in motion control
EtherCAT in a dedicated motion controller platform fully coordinates control and synchronization. How so? Traditionally, the most sophisticated motion controllers are implemented on a centralized controller platform. This is driven by the need for the controller to completely synchronize the servo updates of all axes, so that multi-axis motion trajectories can be executed in a truly coordinated fashion. Centralized control allows the motion controller algorithms access to realtime motion or servo-related data essentially at the speed of the central processor. However, centralized-processor resources become taxed as the number of axes increases. Here, the available processor resources for realtime control must be distributed across more axes, often reducing servo-update rates and ultimately lowering performance.
A different architecture uses distributed processing. This architecture relies on one powerful PC-based machine processer unit (MPU) to handle all machine control tasks except for realtime control algorithms, which are executed by dedicated servo processors (or SPs). Each servo processor controls one or two axes. With this approach, as axes are added, more SPs are added, always maintaining a fixed 20-kHz sampling and update rate, independent of the number of axes. This architecture provides high-performance coordinated motion control.
Traditional communication setup
In a traditional setup, a dedicated high-speed computer bus — such as Peripheral Component Interconnect or PCI — enables the fast, synchronized data transfer between the MPU and the SPs. However, this type of data communication imposes a physical limitation: The MPU and SP chips must reside within a couple of inches of each other. This is where EtherCAT really shines, as it can be used to enable physical distribution and large distances between the MPU (which also acts as the EtherCAT master) and the servo processors, which control the drives.
An EtherCAT-based distributed processor architecture has the bandwidth, synchronization, and physical flexibility to match the power of centralized control plus the advantages of a distributed network. In fact, some processors that use this approach can control up to 64 highly coordinated axes with a 20 kHz sampling and update rate — including position, velocity, and current loops, as well as commutation. Using a standard CAN Over Ethernet (COE) protocol, these processors allow integration of many cross-vendor devices, including motor drives and I/O modules that comply with the standard. Development environments, motion programming languages, and tools on some dedicated control platforms also help machine builders and system integrators minimize cost and time to market, while implementing powerful and high-performance motion control.
The efficient “processing on-the-fly” data-transfer method used in the EtherCAT protocol makes it a strong candidate for high-bandwidth applications such as servo control. By using a dedicated motion controller platform with guaranteed high-speed synchronization and update rates, users can construct full-machine controls. This approach also requires little hardware or software integration, and achieves higher performance than what's possible with network-based solutions.
EtherCAT is faster than my application requirements. Why should I use it?
Superior fieldbus performance can't hurt. Even with slow controls, it improves reaction times and reduces configuration effort, because default settings can be used. Shorter reaction times improve the performance of any application, because transition waiting times are reduced — as when waiting for an input signal before the next step is initiated.
Why does EtherCAT provide cost advantages?
For several reasons: Inexpensive slave controllers lead to lower slave device costs. No special master card is required, as on-board Ethernet controllers are sufficient. No switches or hubs are required, meaning lower infrastructure costs. Standard cabling is used. Auto-configuration is supported, with no manual address setting or costly network tuning required.
EtherCAT is an open technology. What does this mean?
Anyone may use and benefit from this technology. Open also means that EtherCAT implementations must be compatible and nobody may change the technology in a way that prevents others from using it. EtherCAT is part of several IEC Standards (61158, 61784, 61800), ISO 15745, and is also an SEMI standard (E54.20).
Are there instances where EtherCAT should not be used?
Yes. EtherCAT cannot be used wirelessly. Frame processing depends on a physical layer that can support the “processing on the fly” capabilities of the slave controllers, and has link detection schemes based on 100BaseTX or 100BaseFX — not to mention the jitter and delay introduced by wireless systems.
Source: EtherCAT Technology Group
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: