Learning Gear Essentials from Dudley's Handbook
This file type includes high-resolution graphics and schematics when applicable.
Gears are a large source of controlled motion, helping to create and direct motion within all types of mechanical objects. These range from devices as simple as toys to cars—and even to large pieces of manufacturing.
Dudley’s Handbook of Practical Gear Design and Manufacture lays out the essentials of gear design, with topics including key gear terminology, the fundamental equations in their design, the tools to build them, the software to analyze them, and even how to predict their failures. Machine Design had the opportunity to speak with author and professor Steve Radzevich to discuss the most recent revision of the book.
Please tell me a little about yourself and your background.
I am a professor of mechanical engineering and a professor of manufacturing engineering. I received my Master’s in science in 1976, Ph.D. in 1982, and my doctorate in science (engineering) in 1991, all in mechanical engineering. I have extensive industrial experience in gear design and manufacture. I have also developed numerous software packages dealing with computer-aided design (CAD) and computer-aided machining (CAM) of precise gear finishing for a variety of industrial sponsors.
My main research interest is the kinematic geometry of part surface generation, with a particular focus on precision gear design, high-power-density gear trains; torque share in multi-flow gear trains; design of special-purpose gear cutting/finishing tools; and design and machine (finish) of precision gears for low-noise and noiseless transmissions of cars, light trucks, and so on. I have spent over 40 years developing software, hardware, and other processes for gear design and optimization. Besides my work for industry, I train engineering students at universities and gear engineers in companies.
I have authored and coauthored over 30 monographs, handbooks, and textbooks. The monographs Generation of Surfaces (RASTAN, 2001), Kinematic Geometry of Surface Machining (CRC Press, 2007, 2nd Edition 2014), CAD/CAM of Sculptured Surfaces on Multi-Axis NC Machine: The DG/K-Based Approach (M&C Publishers, 2008), Gear Cutting Tools: Fundamentals of Design and Computation (CRC Press, 2010), Precision Gear Shaving (Nova Science Publishers, 2010), Dudley’s Handbook of Practical Gear Design and Manufacture (CRC Press, 2nd Edition, 2012, 3rd Edition 2016), Geometry of Surfaces: A Practical Guide for Mechanical Engineers (Willey, 2013) are among my most recently published volumes. I have also authored and coauthored over 600 scientific papers, and hold over 250 patents on inventions in the field (USA, Japan, Russia, Europe, Canada, Soviet Union, South Korea, Mexico, and others).
This is the third edition of the book. What is the history of the book and what is the main purpose?
The book originated from the original 1954 book Practical Gear Design by D.W. Dudley and published by the McGraw-Hill Book Company. However, D.W. Dudley’s 1954 book is not the first edition of the Dudley’s Handbook of Practical Gear Design and Manufacture.
In 1984, McGraw-Hill Book Company, based on the ideas and instructions from D.W. Dudley, published the 1st Edition of the Handbook also by D.W. Dudley. I took over on the 2nd edition of the Handbook, and it was revised and updated in 2012 by CRC Press. CRC Press published the current 3rd Edition of the Handbook (revised and updated) in 2016. The main purpose of the book has always been to provide gear engineers with an advanced source of comprehensive information on gear design, gear production, and gear application.
What are the essential types of gears used in the industry today?
All of the gears used in the industry nowadays fall into one of three principal types of gearing:
1. Those that operate on parallel axes of rotation of a gear and a mating pinion (external and internal gearings)—spur and helical gears, double-helical and herring-bone gears, Novikov gears, epi-cycloidal gears, etc.
2. Those that operate on intersected axes of rotation of a gear and a mating pinion (external and internal gearings)—straight bevel gears, skew bevel gears, spiral bevel gears, face gear drives, and so forth.
3. Those that operate on crossed axes of rotation of a gear and a mating pinion (external and internal gearings)—hypoid gears, spiroid gears, worm gearings, and others of the same design.
Gearings of numerous special designs are also used in specific applications.
When designing gears, what are the essential terms and nomenclature that one should know?
Prior to beginning designing gears, it is a must to understand how gearings operate—that is, how the gear and the pinion tooth flanks are engaged in mesh, and how they are able to transmit a rotation smoothly (with a constant angular velocity ratio). This problem, which (from the first glimpse) looks like a simple one, is not correctly understood by the most of gear experts—both from industry as well as from academia.
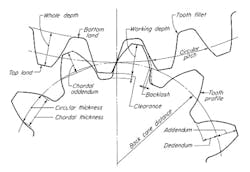
A few of the essential terms include:
• Gear ratio: The number of teeth on the gear divided by the number of teeth on its mating pinion.
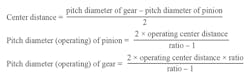
• Operating pitch diameters: The pitch diameters determined from the number of teeth and the center distance at which gears operate.
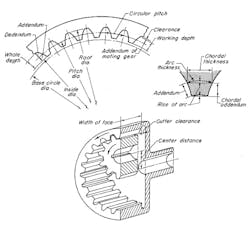
• Base pitch: The circular pitch in the plane of rotation at the base circle.
• Pitch cones: The imaginary surface forming a plane (pitch plane) or a cylinder (pitch cylinder).
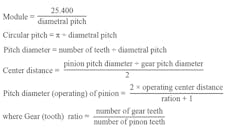
• Center distance: Equal to the sum of the pitch diameter of the pinion and the pitch diameter divided by two.
• Circular pitch: The circular distance from a point on one gear tooth to a like point on the next tooth, taken along the pitch circle. Two gears must have the same circular pitch to mesh with each other. As they mesh, their circles will be tangent to one another.
• Diametral pitch (or module): A measure of tooth size in the English system. In units, it is the number of teeth per inch of pitch diameter. An increase in tooth size decreases the diametral pitch. Diametral pitches usually range from 25 to 1.
• Profile angle (pressure angle): The slope of the gear tooth at the pitch-circle position. If the pressure angle is 0 deg., the tooth is parallel to the axis of the gear—and is really a spur-gear tooth.
• Helix angle: The inclination of the tooth in a lengthwise direction. For example, if the helix angle is 0 deg., the tooth is parallel to the axis of the gear—and is really a spur-gear tooth.
What tools are at an engineer’s disposal to design gears?
Finite element analysis (FEA) is widely used by gear engineers, mainly for the purpose of verifying bending and contact strength of gear teeth, deflections of the gear teeth under the operating load, and so forth. Again, the commercial software KISSsoft is used to design gear pairs. To design gearboxes (including bearings, shafts, gear housings, etc.), corresponding ROMAX software is commonly used.
What are typical failures are seen in gears today?
The typical failures seen in today’s gears are due to the following:
• Insufficient strength (either bending strength or contact strength) causes failure of the gear teeth.
• Poor gear design, along with manufacturing errors, can cause improper load share between two (or more) pairs of the gear teeth, resulting in gear-tooth failure.
• When a gear base pitch (and a mating pinion base pitch) is not equal to the operating base pitch of the gear pair, excessive vibration generation and noise excitation are observed (both can result in a low lifetime of the gearing, as well as in gear failure).
Many of the gear failure modes can be prevented if the gears are (in respective order of the above list) properly designed, properly manufactured, and properly assembled in the gear housing.
Is there anything that you feel design engineers should know when working on gears?
To be concise, all novel designs of gear cutting tools, as well as all novel methods of gear machining/finishing, need to be developed in tight connection with the latest accomplishments in the theory of gearing. No perfect gears can be designed and manufactured if advances in the theory of gearing are ignored.
Results achieved in the theory of gearing are briefly outlined in my other publication, Theory of Gearing: Kinematics, Geometry, and Synthesis. Some of the latest achievements in the scientific theory of gearing can be found in articles published in “Gear Solutions” magazine, AGMA papers, proceedings of International conferences on gears, and so on.
If the gear design is not based on the latest achievements in the scientific theory of gearing, then only approximate gears can be designed and manufactured. Approximate gears do not meet all of the requirements for today’s gears: high power density, low noise excitation, etc. Furthermore, all of the efforts to increase the accuracy of approximate gears are not cost-effective. From the very beginning, gears must be designed as perfect gears, and not take the route of designing approximate gears as is often seen today.
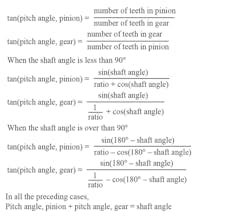
The most common gear types include spur gears, helical gears, internal gears, and bevel gears. Below are the basic equations used for each gear to determine the circular pitch, pitch angles, and pitch diameters.
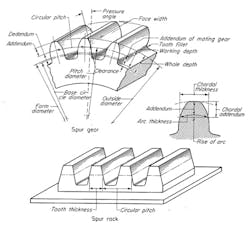
Spur gears
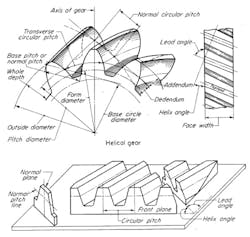
Helical gears
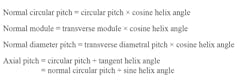
Internal gears
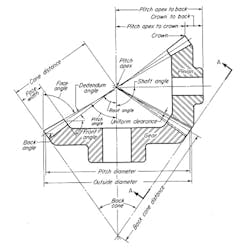
Straight bevel gears