Advanced Magnet Design Fine-Tunes Motion Down to the Smallest Nanometer
Inspection of microchip components is a very precise automated task. The probing of intricate cells requires fine-tuned motion, and that typically means using nanopositioners. The positioners, which can scan large areas with extremely small steps, have separate fine and coarse movement stages that make up their movement. Now, research conducted by A*STAR looks to refine the process by introducing a parallel-actuated system that integrates two new units for improved energy efficiency.
What is a Nanopositioning Device?
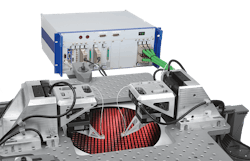
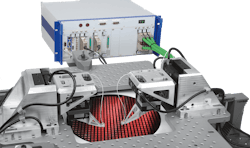
This equipment is a typical test and alignment system from Silicon Photonics wafers based on closed-loop, motorized, XYZ micro-positioning stages and piezo nanopositioning stages.
A nanopositioning device is a mechanism capable of repeatedly delivering motion in increments as small as one nanometer. Industry standards have pushed that requirement to as small as 1/10th of a nanometer and below. There are different methods to achieve nanometer precision motion. The best positioning systems eliminate friction—their drive system and guiding system are frictionless and not limited in resolution. Frictionless bearings also avoid the contacts caused by typical bearing balls and rollers, providing vibration-free motion with a high constant velocity.
Engineers who design these bearings for the guided moving parts work within tolerances of a few micrometers. However, a nanopositioning device requires precision movements that are up to 1000 times greater. Such precise movement is achieved with piezoelectric crystals; they can expand and contract slightly via voltage simulation, and are usually paired with an active feedback sensor for fine-tuned control. The crystal is mounted onto the moving part of a linear actuator capable of large displacements with a single stroke. This configuration is known as a serially actuated dual-stage design.
Integrated Nanopositioning Devices
According to Daniel Tat Joo Teo from the Singapore Institute of Manufacturing Technology (SIMTech) at A*STAR, this typical nanopositioning configuration has inherent problems. “In a traditional serially actuated design, power cables are linked to the fine-motion stage to energize the actuators. These cables cause substantial disturbance and limit the performance of the entire motion system.”
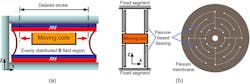
Shown is the conceptual design on the DM configuration of the Lorentz-force module (a) and the flexure-based bearings (b).
Teo and his team at SIMTech and the National University of Singapore have conceived of a different approach to constructing nanopositioners. They chose a magnetic linear motor as a means to establish fine motion rather than relying con piezoelectric actuators. They coupled the motor with hinge-like flexure bearings attached to the coarse translator. This is how their device achieves nanometer movement.
The flexure system offers nanometer-scale movement without dry friction and critically can be controlled with the same electromagnetic machinery used to drive the coarse motor. This combination of motors helps reduce weight and the expense of troublesome cables.
Teo designed a new form of magnetic circuitry. Using a pair of permanent magnets (PMs) facing each other in attraction position, the effective air gap between them will produce an evenly distributed magnetic field as shown above. The attraction between two PMs minimizes the magnetic leakage and provides a less magnetic resistance path for the magnetic field, which emanates from the pole surface of one PM, to flow to the pole surface of the other PM. With an even distribution, the magnetic field will ensure that the magnetic flux density is consistent within the effective air gap. Consequently, the moving coils that operate within the gap will produce a constant force throughout the desired stroke.
This new form of nanopositioning actuator is called the Flexure-based Electromagnetic Linear Actuator (FELA). The figure below is a developed prototype of the FELA with a dimension of Ø40 x 70 mm. It has achieved a positioning resolution of ±10 nm (with an encoder that has 5-nm/count resolution, evaluated through an external laser interferometer) and a 5N continuous output force throughout a 1-mm stroke range.

Here’s the FELA prototype (a) and its potential application in embryo insertion (b).
The experimental prototype was able to move in 20-nm steps without being sensitive to millimeter-scale coarse movements. This prototype could lead to a new era of inexpensive nanopositioning devices. “The parallel-actuated dual-stage design gives reasonably good performance even with a low-cost coarse stage," says Teo. "We plan to commercialize the system to benefit our manufacturing industry.”

