FlyJacket Exoskeleton: Navigate a Drone Using Your Body as the Controller

I can tell you from personal experience that flying a drone is not easy. The ones that I have tried to pilot have very sensitive controls, and I usually end up crashing them. Apparently I’m not alone, as the engineers at Ecole Polytechnique Federale de Lausanne (EPFL) Institute have developed an exoskeleton called the FlyJacket that will allow users to control the drone with their bodies.
The FlyJacket is an upper body soft exoskeleton. Built into the harness is a motion tracking device to track the body’s movements, arm supports to help prevent fatigue, and a virtual reality (VR) headset that lets the user see from the drone’s perspective. The exosuit was developed at EPFL's Laboratory of Intelligent Systems, led by Professor Dario Floreano. Research team members Rognon, C., Mintchev, S., Dell'Agnola, F., Cherpillod, A., Atienza, D., and Floreano, D. co-authored “FlyJacket: An Upper Body Soft Exoskeleton for Immersive Drone Control,” which appeared in IEEE Robotics and Automation Letters.
The FlyJacket was tested with 32 participants (25 male and seven female). They controlled the simulated fixed-wing drone wearing the harness first, then using a remote control. Both times the user would wear the VR headset. The drone was flown in a simulator developed in Unity3D. At the end of the study, participants rated a higher discomfort with the remote controller than when using the exosuit. According to them, the exosuit’s performance compared to that of a conventional remote controller, but it was much more comfortable from an ergonomic perspective.
According to the authors of the study, participants felt more immersed and had a better sensation of flying. They reported less fatigue thanks to the built-in arm supports. The users felt the motion of the drone with their bodies, which allowed them to provide feedback not possible with the controller. Also, by adding the motion of the drone in combination with the VR headset, users felt less motion sickness in comparison to using the headset with a regular controller. This is most likely due to the fact that you are incorporating motion into the user’s field of vision.
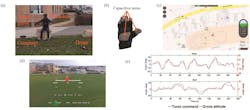
The image above depicts the real teleoperation of the drone using the FlyJacket. (a) user and setup; (b) smart glove with capacitive sensors; (c) Map and drone route; (d) view from the head-mounted display; (e) and logs of the flight. (Image credit: IEEE Robotics and Automation Letters)
Floreano explains in an interview with IEEE that the FlyJacket is one the first steps in a much larger project known as the Symbiotic Drone. The goal of that particular project is to develop technology that would create a symbiotic relationship between a human and a machine, in particular robots that are non-anthropomorphic. This would open door for humans to pilot robots beyond their humanoid counterpart. They could control robots like the quadrupedal ones designed by Boston Dynamics, which run faster and have more strengths than just basic exoskeletons.
The next step for the FlyJacket is to expand its control capabilities. “Currently, only the torso is used to pilot a fixed wing drone. Therefore, the degrees of freedom of the arms are available to implement new commands.
“We are currently investigating an intuitive way to control the throttle for a fixed-wing drone, which would allow control of the flight speed,” he continues. “Controlling yaw should also be studied for controlling a quadcopter. Yet, the aim is to keep the control of the drone as natural as possible.”

