Open-Source AI Bionic Leg Offers a Unified Platform for Prosthetics

An open-source, artificially intelligent prosthetic leg designed by researchers at the University of Michigan and Shirley Ryan AbilityLab is now available to the scientific community to freely copy.
Although the designs and code are free, the leg is still a high-end, state-of-the-art prosthetic, according to the researchers. It’s built around a plug-and-play architecture that will let scientists and biomedical engineers avoid research-and-development costs in the millions of dollars and immediately begin testing on prosthetics for the knee and ankle. It effectively lowers the barriers to entry for researchers.
While designing the leg, the team focused on keeping it simple, low-cost, and portable, yet high-performance. The result incorporates relatively inexpensive parts from just a few suppliers; a modular design that can act as a knee, ankle, or both; and an onboard power supply and control electronics that let it be tested anywhere.
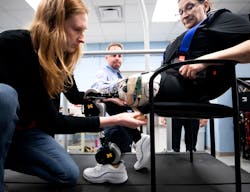
Kim Ingraham, ME PhD Student and member of the Neurobionics Lab, runs tests on an open-source robotic leg with Dawn Jordan Musil. (Courtesy: Joseph Xu, Michigan Engineering)
In addition, the team adapted and incorporated motor technology developed for drones. The flat pancake-style motors trade speed for torque. These lower-geared motors allow for more efficient, finer control and more human-like movements.
Researchers who work directly with people with disabilities often have to build their own robotic legs. Instead of starting from scratch, researchers can take this common platform and, after some assembly, begin working on better ways to help people with mobility impairments. The common platform also lets engineers conduct direct comparisons of control algorithms, which researchers can then iterate and build upon.
While there are many open-source prosthetics for the upper body, such as hands, this is the first such platform for the lower extremities. Research in lower limb bionics has traditionally lagged that of the upper limb prosthetics, primarily due to the need to maintain balance and support a patient’s entire body.
The full bionic leg as specified costs $28,500, which includes parts machined by Star Rapid, actuators from Dephy Inc., and a Raspberry Pi mini-computer that powers the artificial intelligence.

Elliott Rouse, Assistant Professor of Mechanical Engineering, runs tests on an open-source robotic leg with Dawn Jordan Musil. (Courtesy: Joseph Xu, Michigan Engineering)
The advanced AI-based control, led by Hargrove, can adapt the actions of the bionic leg to seamlessly switch activities, such as going from walking to climbing stairs to descending a ramp. To accomplish this, the team used a combination of muscle-contraction signals and sensor data from within the bionic leg to predict whatever behavior is required for the next step.
As an open-source project, anyone can contribute to improving the leg’s design and function. Although the leg is meant as a research tool and not as a build-at-home device, patients involved in the project can help focus and improve the design through feedback in trials. Companies can also prototype the leg with their own parts to enhance the design. And, researchers can use the project website to discuss modifications and suggestions in design and control.
“This represents the future of research: rapid prototyping of open-source robotic hardware and embedded systems with shared code,” says one researcher.
The team is now partnering with groups nationally and internationally to develop and test the leg, including Carnegie Mellon University, University of Texas at Dallas, Georgia Tech, VA Puget Sound and University of Washington, and University of Sydney. The project is supported by the National Science Foundation’s National Robotics Initiative and the MSL Renewed Hope Foundation.
“Our Open-Source Bionic Leg will enable investigators to efficiently solve challenges associated with controlling bionic legs across a range of activities in the lab and out in the community,” says lead designer Elliott Rouse, core faculty at U-M’s Robotics Institute and assistant professor of mechanical engineering. “In addition, we hope our bionic leg will unite researchers with a common hardware platform and enable new investigators from related fields to develop innovative control strategies.”
Details on where to order the parts, how to put them together and how to program the leg are available at opensourceleg.com.

About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: