Protecting Motors Against Overload Conditions Using “I Squared T” Methods

The goal of an effective motor overload protection scheme is to protect the motor from damage while allowing it to operate normally up to its thermal limit. Ideally such a scheme would be based on a direct measurement of internal motor temperatures. Unfortunately, the temperature at different points within a given motor varies widely and it is thus difficult to accurately measure “hot spot” temperatures.
An alternative overload protection method monitors power flow to the motor and keeps track of the magnitude and duration of overload events. Such a method can provide excellent performance without the need for direct measurement of motor temperature. Since power delivered to the motor flows through the drive amplifier, an overload protection scheme based on power flow is well suited to implementation within the amplifier.
Motor Heating
Most of the energy dissipated in a motor as heat is the result of losses in the motor windings. This lost energy (not converted to mechanical energy by the motor) is calculated as:
Energy = Power × Time = I2 × RL × Time
Where I is the RMS current and RL is the effective motor winding resistance.
In order for the motor to achieve temperature equilibrium, the flow of energy into the motor must balance with the energy flow to the mechanical load plus the energy lost as heat. The continuous current rating of the motor is determined as the maximum amount of power (Power = I2 × RL) the motor can continuously dissipate without exceeding its temperature rating.
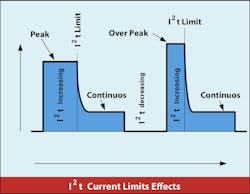
In a transient condition, the motor can tolerate a certain amount of energy in excess of the continuous limit. The amount of overload energy the motor can handle is dependent on the motor size, cooling methods and configuration. For a given motor with winding resistance RL the energy dissipated in excess of the continuous limit is given by:
Etrans = I2 × RL × Time – Icont2 × RL × Time
Where I is the actual RMS current and Icont2 is the continuous RMS current rating of the motor.
The motor overload protection method presented here is achieved by continuously monitoring this transient overload energy and interrupting the amplifier output current before the transient energy exceeds the motor limits.
Amperes-Squared Seconds
From a thermal standpoint, the key motor information is most often provided in terms of 1) The continuous current rating (Arms); 2) the transient peak current rating (Arms); and 3) the maximum duration of the peak current transient (S). Recognizing this we can drop RL and redefine the key equation in terms of current and time only. Thus we have:
Enew = I2 × Time – Icont2 × Time
Where Enew has units of Amperes squared-Seconds and is called “I squared T” and is a measure of the energy content of an overload transient.
The comparable measure of motor overload capability is calculated as the square of the peak current rating (Amperes squared) times the rated peak current time (Seconds). The algorithm attenuates the output current when the measured I squared T of the overload exceeds the calculated I squared T rating of the motor.
The Amplifier
The current sensor outputs are fed back to the microcontroller (with integral A/D) for use by the overload protection algorithm (aka I2T algorithm). The user-programmable values provide the algorithm with measures of the rated continuous motor current and the motor I2T rating. The I2T algorithm is implemented independently on each output (phase U, V and W), but an overload detected on any one phase will interrupt current on all three outputs.
Application Example
In this example, the amplifier is being used to drive a motor with the following overload characteristics:
- Continuous current limit: 15 Amps
- Peak current limit: 30 Amps
- Max. duration of peak current: 1 Second
The I2T limit can be calculated from the given data:

Enabling IIOT
As a side benefit to protecting the motor, the drive can also measure, log and report RMS current that goes to the motor. Users can analyze this Industrial Internet of Things (IIoT) data to create predictive maintenance models or even apply machine learning techniques to process optimization.
Regardless of the input command, the amplifier will invoke current limiting following an overload on one or more phases of 30 amperes for 1 second. Note that the constant in the equation is the I2T limit of 675 A2S set by programmed values. Therefore limiting will go into effect sooner if the overload current is greater than 30A or later if the overload current is less than 30A. As an example with an overload of 20A, limiting will go into effect after a time T1 given by:

In Limit Effect
What is the algorithm behavior when the limit has been reached? Once the current limiting occurs, the output current in all phases will fall to a level less than or equal to the continuous current settings. When the output current has fallen below the continuous limit, the difference between the actual current and the continuous limit current will be negative and the I2T tracking variable will fall. When the I2T tracking variable falls below the I2T limit, current limiting is turned off and the amplifier output then follows the output normally.
Dean Crumlish is product and applications manager for Copley Controls.
About the Author
Dean Crumlish
Product and Applications Manager, Copley Controls
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: