Actuators and Drives: Foundations of High-Performance Motion Systems

Enjoying Machine Design’s Motion Systems content? Be sure to check out the rest of our Takeover Week coverage here.
Imagine an XY table so responsive that you could walk across the floor 100 ft away and watch the vibrations move the device.
The awe is evident in the voice of Chuck Lewin, founder and CEO at Performance Motion Drives (PMD), as he shares the level of precision his company helped to achieve in a motion system for their client, Dover Motion.
“It’s absolutely remarkable,” Lewin says. “When you really play with these things that have taken the ability to measure to crazy levels, all kinds of weird and fun things happen.”
Using a PMD control chip embedded in the drive combined with sin/cos encoders and compensation tables, Dover Motion enabled maximum performance of their actuators, and captured measurements in picometers (at a distance, no less).

Dover Motion works in industries such as life sciences and metrology and does not actually calculate the vibrations of footsteps—but the rig it built was so accurate, it could.
Industries such as biotech and semiconductors are pushing the capabilities of motion systems because their setups increasingly require higher precision, faster speeds and greater efficiency.
Material improvements to linear motors and hybrid actuators have helped to unlock higher performance, but the innovation lies in how they work in tandem with feedback systems. Miniaturization, compensation techniques, advancements in encoders and the integration of intelligent drives have all helped engineers narrow the gap between the speeds of linear motion and the complexities of control.
Mechanical Innovation and Miniaturization
There are four main trade-offs engineers need to consider when initially designing a system: precision motion performance, speed and dynamics, acquisition cost and total cost of ownership and availability.
Following that are stroke length, payload capacity, force output, types of bearings and motor construction, among others.
The application determines the solution. For example, for systems requiring high force, such as vertical operation or movement of heavy loads, motors driven by lead screws or ball screws can be more advantageous than non-contact direct drive systems. The trade-off: Lead screws cost less but are less fast due to more friction and heat.
Miniaturization is transforming all of manufacturing—and it starts in the motor itself.
There are already trade-offs between the design of ironcore linear motor and ironless linear motors. Ironcore are more affordable, priced lower and offer higher force and acceleration, but their teeth create cogging, which means less precision. Ironless motors offer smooth motion, but lower force output.

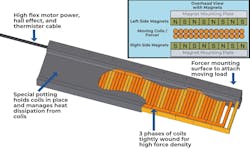
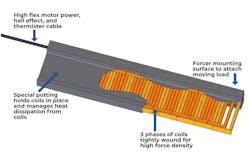
Aerotech is one company taking that difference and minimizing it. Its proprietary ironless coil design weaves the copper coil in such a way to minimize empty space inside the motor, which reduces cogging and magnetic attraction to give higher position control and force density.
The force output may be lower than ironcore, but the smooth motion of Aerotech’s ironless design can still command a powerful force density result—its direct drive BLMX linear motors use a forcer and U-channel magnet track to produce 1,063 Newtons (239 lb) of continuous force and 4,252 Newtons (956 lb) of peak force.
One of Aerotech’s clients involved in the instrumentation of next-generation DNA sequencing needed long travel time to cover a whole sample, quick movement to complete step and settle, and the ability to remain in position for a considerable time while collecting measurements.
Aerotech implemented one of its XY ironless linear motor stages for the application and achieved high accelerations of more than 1G and 200 millimeters-per-second (mm/s) speed over the work area, outshining a typical lab process that might have used a slower, screw-driven stage.
The ironless stage tightened up dead time between measurements, allowing the users to complete their process faster.
“If we can increase throughput, increase the precision and stability, and make products available, that’s really what’s driving a lot of the development in the industry,” says Brian Fink, product manager at Aerotech.
Shrinking motor and stage design has brought the integration of drives and sensors right to the workpiece. Besides the performance benefits of continuous feedback, miniaturization brings a higher density of components on the line, allowing for more to be produced in a smaller space.
With miniaturization, engineers can place smaller electronics such as MOSFET and IGBT far closer to an actuator than ever before, ensuring less noise and improved signal transmission for better switching because analog signals degrade when transmitted over a long length of cable. The continual move away from those hefty 23-bit encoders in the ongoing shift to serial interface encoders has also allowed engineers to move to smaller designs and improve sensing capabilities.
“Shorter signals are your friend, always,” says Lewin.

Smarter Control Forgoes Expensive Mechanics
Compensation techniques can achieve higher performance while reducing the need for specific, costly mechanics. Biotech and semiconductor applications are more likely to use compensation tables than hydraulics.
Electronics can rectify situations when the devices are not performing to the optimal degree. Engineers can counteract challenges such as friction, backlash, vibration, thermal expansion, non-linearity and compliance using software, hardware or control strategies to produce more precise results.
Motor torque ripple is one such problem that can be solved by a simple compensation table. Perfect torque cannot be achieved when rotating a brushless motor. For smooth motion, engineers can measure the actual torque output and adjust the command to deliver on the difference.
Lead screw compensation can correct non-linearity. When machining imperfections on lead screws introduce small positioning errors, engineers can characterize the pitch error and friction movement and store that data in the drive to be used for pre-correction.
Encoder positioning compensation can be executed by adding modifications in a few ways: to an analog Hall sensor to measure magnetic field strength and produce a proportional voltage; to a sin/cos encoder to measure the precise position of a stage or motor shaft at a very high resolution; or to an incremental encoder that produces quadrature digital square waves.
“You don’t need to have a fundamental sensing technology that outputs perfect mathematical sinusoids," explains Lewin. “You can compensate for that.”
Precision motion provider Physik Instrumente (PI) uses a combination of mechanical and control technologies to mitigate challenges with high-acceleration applications, including finite element analysis, advanced simulation and targeted stiffness improvements that avoid adding extra weight.
To reduce vibrations, PI uses air bearings instead of ball or roller bearings, as well as control algorithms that produce smoother drive signals and eliminate the need for costlier mechanical designs.
Control-based compensation, using feedforward or feedback loops, can pre-compensate or “anticipate” errors in real time to deliver optimal performance, a method Lewin says works best if the drive is co-located with the actuator.
“This brings up one of the challenges with all of these fancy compensation schemes—they tend to be linked to the actuator or the motor,” he explains. “That, from a production perspective, makes it trickier.”
For the most accurate results, the output of every actuator should be measured individually, but that becomes a trade-off between time and cost. Instead, engineers often measure a few actuators to determine average values and ensure that any variations fall in line with the compensation table.
Compensation can change over time particularly if the environmental conditions affect the performance of the actuator, so ongoing monitoring is required.

Advancing Control with Hybrid Actuators
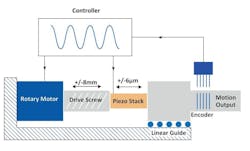
Many types of hybrid actuators—from piezo and screw drives to scanners and stages—are used in ultra-precision processing, high-speed scanning over a range, load-sensitive systems and multi-functional setups. No matter the application, hybrid systems allow each component to shine while combining benefits in smoothness, speed and range in a way that a singular actuator cannot.
Physik Instrumente (PI)’s F-713 hybrid uses a hexapod to perform coarse positioning, and an integrated piezo stage to perform alignment.
“The coarse drive provides long travel, while a low-inertia fine alignment stage enables high-speed scans by moving only a small mass instead of the entire XYZ structure,” says Bede Espinoza, product line manager at PI via email. “This approach also minimizes recoil forces on the surrounding mechanics, improving overall stability.”
Hybrid actuators can perform in ultra-precise, unique applications, like in the Extremely Large Telescope (ELT), the world’s largest optical telescope. PI’s hybrid actuators use a voice coil or piezo component in line with a screw drive and a common encoder to ensure less backlash and stiction. This setup was used in over 2,000 instances in the ELT to align the telescope’s mirror segments.
However, this approach does not come without its challenges, says Espinoza. “In a hybrid drive with a shared position feedback sensor, two independent servo loops are required to manage the different actuation systems,” he explains. “Careful tuning is essential to prevent the loops from counteracting one another.”

Teaching Old Motors New Tricks
Giving tried-and-true parts new life is another way to achieve higher performance with motors. Take a simple stepper motor, which normally runs on an open loop, and attach an encoder to make it perform like a precision actuator through a closed loop.
In this case, the stepper motor is not driven by how many steps it performs, but by the number of encoder positions and their accuracy.
“It totally decouples, to some extent, the sophistication of the construction of the motor, and it puts all the responsibility for final positioning accuracy into the encoder,” says Lewin.
Closed-loop stepper is an attractive solution because it enables basic, relatively low-cost motors to achieve higher torque and smoothness, and less noise.
“You’re sort of getting the best of both worlds,” says Lewin. “All the additional cost is in the drive and electronics, but those costs just keep going down.”
Feedback Improvements
Motors and stages use feedback, often via an optical encoder, to provide high-resolution position data into the control loop. If there is a difference between where the controller believes the position is based on the encoder’s reading and where the user indicated the position should be, the controller will try to reduce the difference to zero by sending current to the motor.
“How it does that depends on its tuning,” says Fink. “It comes down to three elements: accuracy, stability, speed of response. Again, you’re making trade-offs with those things.”
Force control is a type of feedback used when contact forces must be precise. It involves a force sensor or load cell to observe the force level and compare it to the position and, depending on how the feedback loop is set up, can be used for closed-loop control.
For motion control in dispensing and laser processing, position-synchronized output can fire pulses directly based on position feedback rather than on traditional time and velocity.
These applications are “only possible by marrying the controller to the mechanics,” says Fink.
Those feedback loops keep improving. Lewin calls advancements in the encoder field a “quiet story, but it really is a revolution.”
“What you can buy now for $25 is insane in terms of the accuracy,” he says.
As encoder costs continue to drop, Lewin says dual-loop control, while relatively uncommon now, is a powerful way forward for linear motors. With a dual-loop actuator, one encoder on the motor provides stabilization and a second encoder on the end effector delivers additional feedback for stability. The importance with this setup is measuring the end position, not any of the data that went into getting it there.
At Aerotech, infinite field of view technology for laser processing integrates a highly dynamic scan head with slower positioning stages and a single common controller to coordinate simultaneous motion.
The setup captures erroneous motion signals with feedforward modelling, so that the scan head corrects the errors from the linear axes in real time.
“You’re splitting off the motion profile into higher dynamics and lower dynamics,” says Fink. “By doing so, you let each piece of mechanical equipment do what it’s designed to do best. And so, as a result, you can make parts faster with lower errors, because using infinite field of view eliminates stitching errors altogether.”
Bringing Mechanical and Electrical Together
The move toward higher performance in the actuator and linear motor space has been largely driven by advanced simulation, says Espinoza at PI. “Ultimately, system performance depends on the quality of the controls and feedback sensors,” he says.
Biotech and semiconductor applications will continue to demand more precise systems, while increasingly cheap and continually improved encoders and CPUs are bringing better results.
Innovations to mechanical parts will always be the core of motor design, but it is what engineers can do with the electrical components, corresponding compensation schemes and feedback loops that will bring actuators and drives closer to an environment where there are no design trade-offs.
About the Author

Kristina Urquhart
Kristina Urquhart is an award-winning writer and publisher in Toronto, Canada who, since 2007, has covered a variety of industries including manufacturing, technology and business.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: