Adaptive Nonlinear Algorithm Optimizes Servo Control

Servo controllers commonly use traditional cascaded configurations in which a velocity loop is nested within a position loop. This configuration originated when current and velocity controllers were hardware, while position control was done using software. Cascaded configurations remain popular because of their simplicity. Engineers first tune the velocity controller then the position controller, with current control parameters usually set automatically. And the position controller is typically a simple proportional coefficient, while the velocity controller includes a proportional coefficient and an integral term.

The primary drawback of this configuration is an intrinsic tracking error during movement that is proportional to the speed of that movement. You can reduce this error with feed-forward methods, but at the expense of an overshoot or a longer settling time.
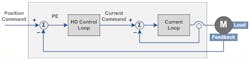
A new adaptive non-linear control algorithm developed by Servotronix Motion Control overcome these limitations and improves servo performance in high-precision motion applications. Named HD Control (HDC), this proprietary algorithm uses a parallel configuration in which all branches are on the same level and executed in each sampling period. A variable gain parameter introduced on each branch is automatically optimized for high gain and stability. As a result, position error and settling time are minimal compared to those of other controllers.
HDC’s primary components are a variable gain module, which contributes to low tracking errors, and an adaptive feed-forward module, which allows short settling times.

1. Variable Gain Control
The variable gains—VGd for velocity, VGp for position, VGi for the integral of position, and VGiv for position and the integral of position—are calculated internally and modified during operation by the HDC algorithm. Each gain is a specific function of the system variables, such as velocity and position error. During movement, variable gains may reach values up to 10 times higher than times of no movement. This produces highly accurate path-following during movement, together with quiet, low-speed operation and standstills. Moreover, system stiffness is more than tripled during movement, resulting in small tracking errors.
The four variable gains are balanced by a proprietary algorithm that maintains system stability. The Kd parameter branch is comparable to the velocity feedback loop and reduces velocity error. The Kp parameter branch is a proportional position feedback loop for reducing position error. The Ki parameter branch is an integral of the position feedback loop and reduces standstill error.

The Kiv parameter branch is unique to HD Control and combines the effects of the Kp and Ki branches. It creates a stiffness more than double that of Kp without causing oscillations. It reduces the tracking error during both acceleration and standstill. It also eliminates standstill error as does integral feedback (Ki), but with the rapid response time of proportional feedback (Kp).
2. Adaptive Feed-Forward
The adaptive feed-forward module shortens settling times. Because of the Kiv and Ki branches’ exceptional strength, most of the feedback response (current command) resides in the integral term. During movement, communication between acceleration and motor torque is monitored, and this relationship is used during deceleration to process the integral term.
At the end of movement, the adaptive feedâforward algorithm modifies the content of the integral term according to anticipated (expected) path acceleration, thus yielding zero settling times.

3. Autotuning
Interface software inside Servotronix servo controllers handles autotuning. But certain applications may require manual fine tuning for optimizing control parameters.
Automatic and manual tuning is based on the same principle. During autotuning, movement quality is measured and evaluated by the drive and software. During manual tuning, users evaluate movement quality. In both methods, servo control parameters are modified progressively to find and use values that lead to the best performance.
HDC tuning is performed much like conventional PID tuning. Each variable gain is increased progressively until oscillating begins. The variable is then reduced about 10 to 20% to a safe value.
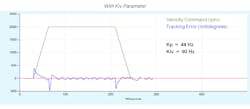
By way of example: A gantry robot required sustained accuracy of 2 to 3 micrometers at maximum speed. Using the HDC algorithm increased the robot’s maximum speed from 120 to 160 mm/sec while maintaining the required accuracy. This resulted in a 33% increase in machine throughput. And in a comparison test against another servo drive at a speed of 160 mm/sec, the algorithm led to higher accuracy and a lower ripple.
In conclusion, HD Control is proving to be particularly advantageous in applications requiring accurate path tracking and low settling time, including CNC and cutting, conveyor tracking, pick-and-place operations, PCB mounting, and welding, as well as painting, coating, and gluing.
Yves Villaret is the Chief Technology Officer at Servotronix Motion Control, based in PetachTikva, Israel. Visit servotronix.com for more info.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: