Closing the Loop for More Energy Efficient Step Motor Operation

Step motors offer the advantages of simplicity, excellent positioning, and economy. They are increasingly popular for use in general automation tasks including indexing, positioning, inserting, feed-to-length, and more. With the advent of closed loop operation, they are also finding use in force and torque control applications.
When applying step motors, users must understand how to address certain characteristics to optimize their performance. For example, traditional step motor systems run in open loop control. That means the drive electronics continuously supply current to the motor whether or not the load is demanding torque. What happens to that current when there is no torque demand? It is lost as heat.
Lost power might seem to classify open loop step motors as inefficient devices. While highly efficient when producing torque, step motor systems can lack operational efficiency when they are not. However, making a greener, more efficient step motor system for all situations simply involves closing the current loop.
A Power-Saving Solution

StepSERVO Integrated Motors offer numerous benefits over traditional, open loop step motors systems including higher torque, faster acceleration rates, greater throughput, reduced noise, and greater efficiency.
Closed loop step motor systems automatically reduce current to the motor when the load is not demanding torque by employing the following:
- A common feedback device, such as an incremental encoder, to monitor commanded shaft position versus actual position.
- Current control algorithms that dynamically control motor current based on the error information provided by the feedback device.
The overall current reduction achieved by using this approach saves power over conventional step motor systems and greatly improves the efficiency of the motor. This can be seen in action with a simple test.
Measuring Power Consumption
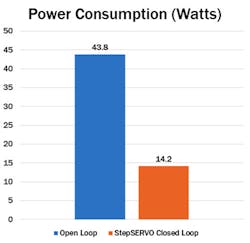
Figure 1: Depicted is the power consumption of open loop vs. closed loop stepper systems.
Consider a side-by-side comparison of a traditional, open loop step motor system and a fully closed loop system with incremental encoder and servo control firmware that close the current loop of the step motor. Other than the encoder and firmware, the two motors are identical. They are also coupled to identical rotary loads and are instructed to perform the same motion profile. Power consumption to each system is then measured using a power meter, with readings taken over time as the two motors cycle repeatedly through their motion profiles. The data from the meter is collected and compared.
The Difference is Clear
Figure 1 above shows the data taken from the side-by-side comparison of power consumption by an open loop step motor system and a closed loop system. The diagram shows that the closed loop stepper system will consume as little as a third of the power of a traditional step motor system when doing the same work. By closing the current loop, a step motor can operate with less power, improved efficiency, lower costs, and with reduced downtime due to the elimination of excessive motor heating.

A side-by-side comparison of StepSERVO closed loop and open loop step motors is used to show performance differences such as the increase in energy efficiency provided by closed loop motor and drive systems.
Additional Benefits
Energy efficiency is just one of the benefits of closed loop stepper systems. Additional benefits include peak torque for faster acceleration and greater throughput (up to 50% more torque than the motor’s rated holding torque), quieter operation due to less current in the motor windings (reductions of 10 dB or more are common), and improved overall system accuracy due to the elimination of stall conditions (open loop systems can stall without warning or alarm if not properly sized).
Closed loop step motor systems are beneficial in both new and existing applications. Existing open loop step motors can be easily replaced with closed loop systems. Closed loop motors are available in the same NEMA frame sizes as open loop motors, and closed loop step motor systems can be connected to other devices in the application such as sensors, PLCs, and HMIs using the same I/O signals and network communications as existing systems.

About the Author
Eric Rice
Marketing Director
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: