Will Robots Replace Stuntmen?

As you’re no doubt aware, cat videos have been dominating the internet for years. But cat exploits are also of keen interest to scientists, and not just for their entertainment value: They have been documenting cats’ ability to land on their feet, so as to gain a better understanding of how to control movement in freefall.
The ability to use electronics to control actuators is basic robotics. Having more control often means the robot can do more tasks, and more complex tasks. For example, having robots walk opens a robot’s ability to navigate terrain that robots on wheels might not be able to. Gyroscopes and accelerometers register real-time data, where and how to shift weight and place feet in order to not fall.
However, what if a robot did fall, or walked off a cliff? Could it rotate like a cat to land on its feet? This would protect the robot, its electronics, and any cargo its carrying (and it would probably look really cool).
BRICK
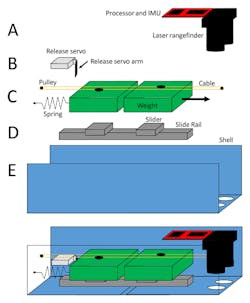
Top: exploded schematic of prototype components: A) sensing (imu and laser rangefinder), computation (microprocessor), and communication (radio); B) release servo; C) weights, cable, and spring; D) linear slide; and E) protective shell. Bottom: cutaway view of assembled components (Credit: SemanticScholar.org)
Acrobatic robots may have started with cats, but subsequently progressed to a BRICK. The Binary Robotic Inertially Controlled bricK received a lot of attention, and even inspired the construction of other robots to be flung through the air. A BRICK has a pulley that runs a cable to two weights able to slide in a single axis that rapidly change the moment of inertia of the robot. How the weights are adjusted is controlled by a processor receiving data from an inertial measurement unit and a laser rangefinder.
While the mechanics seem basic, the software must stay a step ahead of the falling action. By reacting to the data, the robot would land irregularly. Using predictive landing controls made the robot land in a relatively predictable manner.

Final orientations without predictive landing control. Br ins turned on. (Credit: SematicScholar.org)

Final orientations with predictive landing control. (Credit: SematicScholar.org)
ParkourBot
Another highly reference robot in locomotion is the ParkoutBot. A collaboration with Carnegie Mellon and Northwestern University, ParkourBot is a simple design consisting of two springy legs and a body. A paper published by Carnegie Mellon’s School of Computer Science explains how the robot demonstrates simple control laws that can stabilize hopping and control the running speed and direction of 2D and 3D single-leg hoppers.
The ParkourBot is an efficient and dynamic climbing robot. Leg angle and spring tension are independently controlled. The robot climbs between two parallel walls by leaping from one wall to the other. During flight, the robot stores elastic energy in its springy legs; it automatically releases the energy to “kick off” the wall during touchdown. Using open-loop climbing motions to achieve closed-loop stabilization of climbing height, the ParkourBot was able to spring from wall to wall in relatively predictive motions even when the distance between the walls was manipulated.
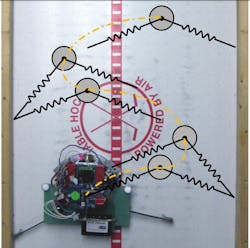
Yes, this is an air hockey table for science. It provides a near-frictionless surface for the robot to move on. The table is lifted on one side to create an inclined plane. This simulates a low-gravity environment for the robot to work in (Credit: Carnegie Mellon University, School of Computer Science).
Atlas
So robots calculate, predict, and react in real time to move in a programmed path. As we advance this idea of locomotion in robots, we start to see robots that can run and jump while avoiding obstacles on uneven terrain. In 2013 Boston Dynamic released Atlas, a robot designed to do search-and-rescue tasks funded by DARPA. While the early prototype was compared to a one-year old learning to walk, Atlas has progressed. Video was released from Boston Dynamic of Atlas doing the following:
- 2013 – Learning to walk, open doors, and drive vehicles for search and rescue
- 2016 – Walking through multiple terrains with obstacle avoidance
- 2018 – Running through uneven terrain, jumping over obstacles, and even doing a back flip
With sensor technology, MEMS, and computing power we may see more of these locomotion robots, but where? Already stated was military search and rescue, but in another video from Boston Dynamic, Atlas was carrying boxes. With a load capacity of 20 lb., Atlas could be ideal for basic labor and warehouse work. However, locomotion robots might be working behind the scenes in movies and the Olympics.
In 2011, injuries caused by lifting, pushing, pulling, holding, and carrying costs businesses $14 billion, which was up from $8 billion just two years prior to that in 2009. These injuries and costs are driving the need for exoskeletons that serve as lift-assistance devices. (Credit: Bureau of Labor Statistics)
Stickman
From cats to BRICKs to a stick, Disney has developed its own acrobatic robot. Geared toward answering questions about how stunts are performed, we have the first generation of Stickman. Having data on how the human body moves in air could assist athletes and gymnasts to perform complex routines or conserve energy for better endurance.
Like a spherical chicken in a vacuum, current training is approximated as disassembly for measuring each human limb is infeasible. In addition, a performer who attempts to make a specific change to their approach to a stunt might inadvertently change many variables at once. Finally, performers watch and approximate joint angles from video, a difficulty compounded by the fact that many human joints do not have a fixed center of rotation relative to the limbs.
Enter BRICK 2.0: The first prototype of Stickman was based off the BRICK robot. But changing the moment of inertia of a body with sliding weights verses a joint added a new level of complexity. In a paper titled “Stickman: Towards a Human Scale Acrobatic Robot,” the authors break down what is essentially a stick with two joints. The paper described Stickman as:
- 7 ft. when fully extended, the approximate the height of a human stunt performer with arms raised over his or her head.
- Actuated by air tanks that store the energy
- Powered by a 12 V lithium polymer battery pack powers the solenoid valves controlling the actuators
When designing a robot designed to be flung through the air some design requirements considered where.
- Easy to reconfigure
- Fast repair
- High peak actuator strength and power
Stickman is specifically using T-Slot aluminum extrusion to allow for reconfigurability of various components based on incremental findings. Both ends of the air pistons can adjust along the length of its links, allowing changes in torque profiles. A large extra weight can be added to the top or bottom link to adjust the robot’s center of mass location and change in moment of inertia. Pneumatic actuators were chosen for their high-power density and are actuated with solenoid valves that are triggered by the Arduino Micro controller board. The top link is outfitted with both a LIDAR-Lite v3 laser rangefinder and a 6-axis InvenSense ICM 20602 inertial measurement unit which comprise the main inputs to the robot.
Once in-flight, the physics of motion are relatively simple. The principal moment of inertia is closely aligned with the angular momentum vector:
L = I × ω
where I is the principal moment of inertia around the axis of rotation and ω is the angular velocity. If the moment of inertia changes from I1 to I2, the change in angular velocity is given by:
ωnew = (I1 / I2) × ωold
This is simplest if the change in inertia from one state to another is smooth, fast, and monotonic, and if the angular velocity is in good alignment with the desired axis of rotation.
While they might seem simple, these locomotion robots push the limits of control, sensing, and fabrication in ways that could have relevance for all mobile robots. Robots like Cyberdyne are helping humans walk, and perhaps someday we will have them aid in the Olympics, action films, and theatre, in addition to complex operations in hazardous environments.

About the Author
Jeff Kerns
Technology Editor
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: