Safety Shock: Sensing ground faults in industrial applications
Created to protect personnel from electric shock, GFCI-type operations now help protect equipment as well.
Authored by: |
Most service technicians in North America are familiar with ground-fault circuit interrupters (GFCIs), a protective device used to minimize the chance of electrocution. Electrical codes have mandated GFCI use in homes since the late 1960s after extensive study of how electrical current affects the human body. It was found that people can feel low currents driven at 120 Vac. While this amount of current flow would not kill a normal person, it may cause them to jerk or try to pull away from the circuit. The result could be an injury or fall.
The most likely location for shock was in the bathroom, where damp tile floors and bare feet combined with handheld electrical devices such as hair dryers or electric shavers could create an easy path through the body to earth ground. Studies of electrocutions showed 100 mA would cause a human heart to fibrillate (beat chaotically with little motion) or even stop beating. So the GFCI devices were designed to shut off power within 20 msec at this current level, fast enough to keep the heart from being affected by the current.
Lower currents were monitored as well, with a corresponding adjustment in response times. For example, just 5 mA of current passing to ground would disconnect the device within 2 sec.
Toroid sensor
The basic operating design for a ground-fault detector, whether built into a circuit breaker or receptacle, consists of a toroid-shaped magnetic core through which the hot (supply) and neutral (return) wires pass. An additional sensing coil wrapped around the toroid core completes the construction. Ideally, the two currents that flow through the hot and neutral wires are identical, but flow in opposite directions creating two identical but opposing magnetic fields. The opposing fields cancel any induced voltage in the sensing coil. This concept is termed “zero sequence” or “zero sums” current detection.
However, if current diverts to another ground path, the hot wire carries more current than the neutral wire and creates a stronger magnetic field. The stronger field induces a low-level voltage in the sensing coil, triggering a circuit that pulls the solenoid contacts open and disconnects the load.
There are other ways to sense unintended current flows to ground and provide similar protection, although each has limitations. For example, consider an installation with power to the load supplied via a wye-connected (star) transformer. The center or common connection is bonded to a grounding electrode, such as a rod, stake, or bare wire. Under normal conditions, no current should flow through this common connection.
Should a ground fault occur in any of the three primary phases, the common connection would then develop a current flow equal to the ground fault current. Thus, a ground fault can be detected and measured by placing the sensing device on this common bonding conductor. The limitation here is that the three phases must draw the same current.
Many electric heating loads get power from threephase sources, but without a neutral connection. The sensing method with three toroids, one monitoring each phase, will not work unless they connect in a wye configuration and the center point of the wye is monitored. The accuracy of the trip point depends on the toroid, and each toroid must produce a highly accurate analog of the primary circuit.
Expanded coverage
It was difficult to sense the small currents involved. So there was a length of development time before the circuit breakers and receptacles became reliable and consistently tripped as designed. But once the technology caught up, the protection requirements for specific circuit locations grew as more locations were added with each National Electrical Code revision.
Recently, the scope of ground-fault sensing has grown beyond protecting people from electrocution. Now ground-fault systems protect equipment so faults do not create sparks, smoke, and fire. This new coverage extends to most electrical-heating equipment where the critical current value has been deemed to be 30 mA. Though NEC article 427-22 covering equipment protection does not state a maximum fault-current value, manufacturers of circuit breakers designed for this purpose still use the 30-mA reference as their standard.
Most industrial applications that sense ground faults use the sensor output to perform one of two operations. In some cases, a contact closes a circuit to energize the operating solenoid of a shunt-trip circuit breaker. Other cases have the contact open the circuit powering a contactor or motor starter operating coil. How the sensor output interacts with the rest of the control system is completely at the discretion of the system designer.
Sometimes deenergizing the circuit will cause an unsafe operating condition. In those cases the sensor contact can be used to trip an alarm, either directly or through a controller, while initiating a safe shutdown procedure.
Shunt-trip circuit breaker
Circuit breakers come in a huge variety of styles. Some are designed to use accessories that increase versatility — at higher cost, of course. Accessory options can include undervoltage trip, alarm contacts, overload heaters, and other load-monitoring and control devices. However, of most interest to groundfault detection is the “shunt-trip” option. The shunt-trip accessory was designed to trip the breaker from a remote location as if there was an overcurrent condition. This is most commonly accomplished using a magnetically operated solenoid to push or pull a latching mechanism, which opens the breaker contacts.
In some applications, the device kills power to the load in an emergency. For example, most gas stations have an emergency switch that turns off all the pumps. This switch typically closes the circuit that operates the shunt-trip breaker. The circuit breaker must be manually reset after the shunt-trip triggers it off, so it is a definitive method to shut off power in an emergency.
When used with a ground-fault sensor, the sensor contact closes the circuit to the shunt solenoid. As in other cases, the breaker must be reset by hand after the fault is corrected. The shunt-trip accessory effectively transforms the autoreset sensor into a latching device. Note that experts highly recommend that the sensor gets its power from an isolated source so that it remains on even though the load is off.
Contact control
A second method of control lets the ground-fault sensor control the power to a contactor coil. Should the sensor detect a ground-fault condition, it opens its contacts to turn off power to the load, as with multiple heating elements or a motor drive. Obviously this means the contact must be closed before the monitored load can be energized.
Most manufacturers, such as NK Technologies, San Jose, Calif., offer both normally energized and normally deenergized versions of autoreset ground-fault sensors. The more common of the two is the normally deenergized version where the output does not change state unless there is a fault to ground exceeding the trip point.
The normally energized version is sometimes referred to as the “fail-safe” version. This style sensor changes its output state as soon as the sensor energizes. The output returns to its normal or shelf state if the power supply to the sensor fails or if the fault current exceeds the trip point. Of course, this means the sensor must be energized and its output state already energized before the load can be powered.
The best place to monitor a circuit for ground faults is near the load, rather than upstream from the load. Many system designers tend to specify sensors that monitor several loads by installing the sensor before a final distribution point. While this approach is economical, any minor leakage issue in each load will accumulate resulting in higher overall current leakage, possibly tripping the sensor.
As an example, suppose there is a need to monitor a machine which produces silicon wafers for integrated circuits. Several heating elements warm water and several chemical wash processes. In addition, there are several motors that position product and adjust variable transformer voltages for various process controls. Heating elements seldom leak current, but often fail as a short to ground. Motors and transformers do tend to develop current leaks before failing.
By monitoring each load individually with separate sensors, each load may be checked for relatively low current- leakage levels. However, if all the loads were combined for single-sensor protection, the sensor would likely need to be set to trip at a much higher leakage level, negating much of the protection.
Another design feature that must be addressed is how the system resets if the fault should clear, which will happen when power is removed from the load. A return to normal conditions should not automatically reenergize the circuit. It is highly recommended that the sensor output be wired so that the contactor must be manually re-energized after the sensor trips. Another possibility is to use a latching output which would then have to be reset.
Loads such as heaters are most likely to either work as designed or short directly to ground. There have been a few instances where the heater leaked a small amount of current as the insulation deteriorated, but that is not a common occurrence. However, loads such as motors and transformers develop small imperfections in the varnish insulation on the windings. If that varnish begins to break down, it does let current pass to earth ground at low levels. Current magnitudes of 3 or 4 mA can seldom be felt by a human and will not cause arcing or damage to equipment. But leakage can rise over time until it does become a concern to both operators and equipment.
A new line of ground-fault sensors now provides a way to record current leakage over time. For example, NK Technologies has developed a ground-fault sensor that outputs an industry standard 4-to-20-mA signal proportional to the fault current. Connecting the sensor in series with a 24-Vdc power supply and a chart recorder or other data-logging device not only provides protection against ground faults, but also monitors for any changes in current leakage over time.
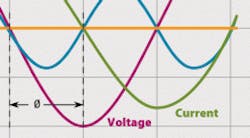
Power monitoring in industry By electrical definition, the watt is a measurement of work, equal to one ampere owing at a potential of one volt. For direct-current circuits, this definition of power works well. But ac circuits may have a di erence between real or active power, expressed in watts, and the apparent power of the circuit, measured in volt-amperes. Only pure resistive loads exhibit the same real and apparent power values. If the load is either more inductive or capacitive, the wattage will always be less than the volt-amperes. The ratio of wattage divided by volt-amperes gives the power factor of the load. The wattage of a single-phase ac circuit equals the volt-amperes times the power factor. The wattage of a three phase load is calculated using the same equation on a single phase and then multiplied by the square root of three, often rounded to 1.732, to account for the other phases. A measurement of the watts used by a load lets users compare the charges billed by the serving utility against the use of a special c piece of equipment, an area in a plant, or the entire facility. The measurement of wattage requires monitoring the voltage and current of the system. Voltage can be measured directly, if below 600 Vac, or through a potential transformer which changes higher voltages to a safer level while still maintaining a high degree of accuracy. Currents are typically measured using current transformers or similar products using di erent techniques. Current transformers reduce primary current to a lower level, usually 5 A in North America and 1 A in other locations, while maintaining a nearly identical wave shape as the primary circuit current. There are many applications where the end user needs to know only the wattage used, while other applications benefit from knowing the actual voltage, current, and power factor. Power monitors are available which can provide each of these measurements, along with averages of each phase current or phase-tophase potential voltage, volt-amperes, power factor, volt-amp-reactives (VARs), and other parameters. The initial cost to measure power is much greater than the cost for measuring current alone. However, some applications benefit greatly from such measurements. One example is the mixing of materials with significant changes in viscosity. The drive motor is lightly loaded at the start of the mixing process compared to the torque needed to move the mixing paddles as the material thickens. The change in current is small between the two extremes due to diƒ erences in the power factor. The power factor will be low at the beginning of the process when the motor is lightly loaded. It becomes higher as the motor works harder, producing more torque. In this application the current does not rise in a linear manner with the load. In contrast, a motor driving an air handling fan draws current in proportion with the speed of the fan. The fan exhibits a poor power factor only for a short period at start until it reaches speed. Applications that use oversized motors with a load that does not need as much torque as the motor can produce will always have low power factors. It’s also possible to detect failing bearings or other operating defects by measuring the wattage. Levels of current may not change much in the presence of these problems. |
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: