MSD 101: Motors and actuators
Motor applications often involve loads that fluctuate rapidly, requiring little power one second and a lot of power the next. Although it would seem reasonable to size the motor for the worst portion of the load cycle, analysis usually shows that a smaller, less expensive motor can do the same job just as reliably and more efficiently.
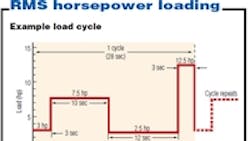
Motors, as long as they have time to cool, can periodically exert short bursts of power beyond their normal load rating. One sizing method that takes this into account is the rms (root mean square) horsepower loading technique.
To apply the method, simply find the rms horsepower of the load cycle. Any ac motor rated beyond this level will work, provided it has enough pullout torque TPO (lb-ft) to keep it from stalling.
Questions & answers
Q: Are there limitations?
A: The rms horsepower loading method works only for duty cycles less than five minutes.
Q: Does the method apply to servomotors and adjustable-speed drives?
A: It works if you use armature current (servomotors) or required torque (adjustablespeed drives) instead of horsepower – provided that the controller can handle peak as well as rms current.
Q: What if the duty cycle is greater than five minutes?
A: There may still be a way to economize, but you need to consult the motor manufacturer.
This material provided by Edward Cowern, P.E., Baldor Electric Co., Ft. Smith, Ark. If you liked this month's MSD 101.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: