What Makes a Good Robot Joint for Cobots?

If you’re planning to build a collaborative robot (cobot) with an articulated arm, precision and safety are among your top priorities. After all, robot joints provide the high torque motion these devices require to enable accurate pick-and-place, material handling and packaging operations.
In addition to good torque performance, quick stops and fast, easy installation are also important. However, not all robot joints are the same. Following are some considerations for implementing a robot joint that will make your cobot both productive and safe for automated processes.
It Starts with an Ideal Rotary Motor
Whether you engineer your own robot joint or choose a modular unit, the robot joint’s rotary motor must exhibit the right characteristics to enable the human arm-like task the robot joint will perform. Here are your main options:
Servo motors. Typically lightweight and able to reach high speeds, servo motors boast many attributes that make them appropriate for robot joints, including high torque and efficiency. To reduce speed, however, servo motors require bulky gearing components that can cause backlash and affect positioning accuracy.
Direct drive frameless motors. This rotary motor style is an attractive choice for robot arm joint applications where space and weight are at a premium and every ounce counts. Because of their close proximity to humans, cobot arms must function at slower speeds than those of their industrial robot counterparts while still operating with great accuracy. That makes high torque an important characteristic in their robot joints.
Direct drive motors are also called torque motors due to their high motor constant—which is their ability to deliver high torque relative to their small size with less heat generation. That means they offer accurate and repeatable positioning, high acceleration and deceleration rates—even under heavy loads—with minimal cogging. Frameless direct drive motors are designed for direct integration into a machine or system.

Direct drive motors incorporate a large number of poles, so they don’t need a gearhead, belts or other mechanical speed reduction components that may otherwise cause backlash. In fact, direct drive frameless motors are comprised of only the motor coil windings and magnets. The result: less load inertia and better load control. Thanks to these benefits, direct drive frameless motors are helping to drive robotics industry innovation by allowing designers to create more versatile and more capable robots than ever before.
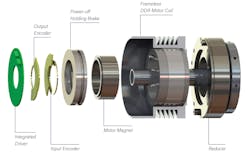
Key Robot Joint Components: An Overview
In addition to your choice of motor, a robot joint comprises other important components. Here’s what you’ll need when engineering your robot joint:
Gear reducers. Robot joints have a very high requirement for accuracy, repeatability and minimal backlash. Gear reducers optimize torque to meet these demands while ensuring the motor runs at its desired speed. Among them, strain wave or harmonic, gear reducers offer exceptionally low backlash performance and high repeatability. They often come integrated within a modular robot joint, saving designers the additional steps of sizing or designing the reducers themselves.
If low backlash is your only requirement for the robot joint, a direct drive motor alone may be all you need since the motor connects directly to the load to achieve true zero backlash and repeatability.
Holding brakes. Used to provide holding torque during normal operation, or to dynamically stop the robot arm in case of emergency stop or sudden power loss, robot joints typically employ either electromechanical pin brakes or spring-engaged friction brakes.
- Electromechanical pin-type brakes have a solenoid valve that blocks the moving structure of the rotor and stops its motion when the power is cut. With this brake type, however, some backlash or free movement is possible due to its low moving resolution.
- Spring engaged friction disk-type brakes are designed with two plates that, when engaged, press against the rotors to fully lock them. This causes a very fast response and allows the robot to securely hold its position—two characteristics that are especially desirable for high-end applications like surgical robots whereby free movement may jeopardize patient safety.
Feedback device. Encoders provide critical feedback data that robot joint components use for position control, compliance and force sensing. When measuring the motor shaft within a robot joint, an encoder with high resolution is able to deliver the most information to the controller. A 19-bit encoder typically offers more than enough resolution for cobot applications. Classifications include:
- Incremental encoders. As the motor shaft rotates, incremental encoders create pulses that are used to measure changes between positions. These encoders are popular thanks to their simplicity and low cost.
- Absolute encoders. This type of encoder assigns an “absolute” value at every position as the motor shaft rotates. They maintain the shaft position when powered off and do not have to “commutate” and find the magnetic angle between the magnet and the coils—a significant pain point when using incremental encoders. Absolute encoders can either incorporate magnetic or optical sensors. Optical encoders typically offer the highest resolution, but unlike magnetic sensors, they are sensitive to dirt and contaminants typically found in manufacturing environments.
Control electronics. The controller should support commonly used communication protocols among industrial devices and networks.
An Individual Versus Modular Solution
If the robot joint calls for special features, it can be engineered from individual components. For example, some manufacturers may choose to integrate force sensors into their joints. This is especially important for medical cobots, which must comply with certain forces within an axis. Engineers can simply select an off-the-shelf direct drive frameless motor—such as Akribis Systems’ ADR Series motor—and create their own design.
Although it often makes sense to prototype and build a robot joint composed of individual components, this approach can also add time and expense to the project. The design also must account for space constraints, thermal management, cogging torque, positioning accuracy and safety provisions.
Modular robot joints have emerged as an easy-to-implement way to achieve natural arm motion so a cobot or industrial robot can perform its tasks. They integrate all the essential components into one assembly that occupies less space when compared to a prototyped design. This high level of integration also results in a lightweight unit that is particularly attractive for cobots with lighter payloads. Modular robot joints typically incorporate a frameless motor with a large through-hole to simplify wiring, assembly and installation. Additional benefits include high power density, exceptional dynamic performance and reliability.
READ MORE: Use RDT for Miniature DC Gearmotor Life Projections

A Modular Robot Joint that Eliminates Prototyping Pain Points
Akribis Systems’ ARJ Series is an example of a modular robot joint that eliminates many of the headaches associated with prototyping a robot joint from individual components. It comes with a high-torque direct drive frameless motor with optimized windings to minimize cogging forces, spring engaged friction disk holding brakes to securely hold the robot’s position without backlash, along with integrated EtherCAT Motor drives behind the joints.
The modules also include two 19-bit encoders—one on the load side, and one on the motor side, with a high-stiffness, precision strain wave gear reducer between them. This arrangement allows the controller to calculate the torque acting on the payload in order to provide force sensing and compliance control so the cobot can operate near humans.

90-deg. T-mount housing. Specifications include:
- Five sizes ranging from 70 to 142 millimeters OD.
- 100:1 (standard) direct drive motor gear reduction ratio with options for 150:1, 50:1 or 30:1 ratios.
- Weights from 1.2 to 8.3 kilograms.
- Continuous torque from 12.7 to 248 Newton-meters.
- Peak torque from 32 to 383 Newton-meters.
- Accuracy: 200 arcsec.
- Bi-directional repeatability: 20 arcsec.
Note that the length and weight of the joint depends on the driver option and mounting configuration. Be sure to consult with your supplier before ordering. When ordering, also request they ensure the mounting interface for the base is located close to the load side of the unit in order to minimize the bending moment load.
Partner with a Motion Control Specialist for Custom Designs
Sometimes designers may find themselves in that middle ground between choosing an off-the-shelf modular robot joint or building their own unit. That’s when a motion control specialist can help.
Using the frameless direct drive motors as a foundation, the motion control specialist can take your requirements and modify an ARJ Series robot joint to meet your exact specifications in a cobot or robot application. Some modifications might include:
- Different mounting configurations or lengths.
- A standalone robot joint module or a custom-designed mechanical system to house a customer’s preferred control electronics or driver.
- A custom integrated driver and controller assembly designed to mount inside the module.
- Adding an external controller.
- Weight reduction, by removing non-essential components. For example, some robot joints may not require power-off locking. In such a case, you may request the brake be removed, which can otherwise add to a module’s space and weight requirements.
Direct Drive Motors and Modular Robot Joints Deliver Significant Benefits
When it comes to robot joints for cobots, having a motor with excellent torque characteristics as well as all the essential components in one unit will provide significant benefits. With complete robot joints that incorporate direct drive motors, you’ll eliminate the time and complexity involved with engineering your own assemblies while ensuring optimal performance, safety and reliability.
This article was adapted from a white paper submitted by Akribis Systems. Wan Yi is an mechanical engineer at Akribis Systems, and Shi Jiameng is a senior product manager at Akribis Systems.
About the Author
Wan Yi
Mechanical Engineer, Akribis Systems
Shi Jiameng
Senior Product Manager, Akribis Systems
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: