Drones in the Air: Quadcopter Emergency Backup Control

Just as the behemoths of technology are racing to take drone delivery to the sky, demand for improving design, technology and mechanical components is reaching new heights. Quadcopters, or drones with four propellers, are thought to be up to the task due to their ability to smoothly hover in place and fly in all directions.
But what happens when one of the four propellers fails?
With only three rotors working, the drone loses stability and inevitably crashes, said researchers at the University of Zurich and the Delft University of Technology.
They have a solution to the problem: an emergency control strategy that uses information from onboard cameras to stabilize the drone. Moreover, they said, the solution can keep the drone flying autonomously after one rotor suddenly gives out.

“When one rotor fails, the drone begins to spin on itself like a ballerina,” explains Davide Scaramuzza, head of the Robotics and Perception Group at UZH and of the Rescue Robotics grand challenge at NCCR Robotics, which funded the research.
He said that high-speed rotational motion causes standard controllers to fail unless the drone has access to accurate position measurements. Once the drone starts spinning, it loses its ability to estimate its position in the air and eventually crashes.
One way to address this problem is to provide the drone with a reference position through GPS. However, the problem persists in places where GPS signals aren’t available. The researchers instead offered a solution using visual information from different types of onboard cameras.
How It’s Done
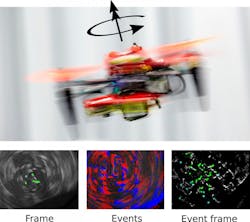
Two sets of cameras were attached to the quadcopters:
- Standard cameras—these record images several times per second at a fixed rate.
- Event cameras—these are based on independent pixels that are only activated when they detect a change in the light that reaches them.
Next, the team developed algorithms that combine information from the two sensors and use it to track the quadrotor’s position relative to its surroundings. The researchers explained that this configuration enables the onboard computer to control the drone as it flies—and spins—with only three rotors.
Although both types of cameras perform well in normal light conditions, the standard cameras become ineffective in weak lighting. “Standard cameras begin to experience motion blur [when illumination decreases]; that ultimately disorients the drone and crashes it, whereas event cameras also work well in very low light,” said first author Sihao Sun, a postdoc in Scaramuzza’s lab.
Further Direction
The in-development solution is a milestone for drone technology, especially as quadcopters become more prevalent. Rotor failure may cause accidents, noted the researchers, and this work can improve quadrotor flight safety in places where GPS signals are weak or absent.
About the Author

Rehana Begg
Editor-in-Chief, Machine Design
As Machine Design’s content lead, Rehana Begg is tasked with elevating the voice of the design and multi-disciplinary engineer in the face of digital transformation and engineering innovation. Begg has more than 24 years of editorial experience and has spent the past decade in the trenches of industrial manufacturing, focusing on new technologies, manufacturing innovation and business. Her B2B career has taken her from corporate boardrooms to plant floors and underground mining stopes, covering everything from automation & IIoT, robotics, mechanical design and additive manufacturing to plant operations, maintenance, reliability and continuous improvement. Begg holds an MBA, a Master of Journalism degree, and a BA (Hons.) in Political Science. She is committed to lifelong learning and feeds her passion for innovation in publishing, transparent science and clear communication by attending relevant conferences and seminars/workshops.
Follow Rehana Begg via the following social media handles:
LinkedIn: @rehanabegg and @MachineDesign
YouTube: @MachineDesign-EBM
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: