Five Design Tradeoffs When Evaluating Robot Gearboxes

Four- and six-axis robots are typically selected using published specifications such as reach, payload and repeatability. Gearbox architecture is often treated as an internal robot supplier decision. In deployment, however, reducer behavior determines whether a robot is stable in motion, settles quickly and maintains performance over months of duty cycle.
The gearbox is the mechanical interface between motor torque and joint motion. Its compliance, lost motion and wear mechanisms appear as settling delays, path deviation and tuning sensitivity during integration.
For integrators, the practical question is not which gearbox is “best.” The question should be which tradeoffs are being accepted and whether they align with the task. The checks below focus on what reducers change in the field: stiffness, backlash, lost motion, dynamic loading response and performance drift.
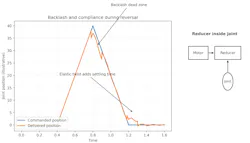
1. Backlash is visible, but “lost motion” is what the robot delivers.
Backlash is the clearance between gear teeth that appears as a dead zone during direction reversal. It is often discussed as a proxy for precision. In practice, the more relevant concept is lost motion, which includes backlash plus elastic twist, bearing compliance and control response.
READ MORE: How Technology Is Rewriting Backlash and Gearbox Performance
A low-backlash joint can still behave “soft” if torsional stiffness is low. That softness appears as longer settling, overshoot during reversals and sensitivity to tool changes. A higher-backlash system can remain stable if stiffness is high and the task avoids frequent reversals. Backlash alone does not predict whether a robot will settle cleanly under load or meet required cycle times without additional tuning.
Design implication: Gearbox behavior must be evaluated as a dynamic system property, not a static number, if the goal is predictable settle time and stable part placement in production.
2. Torsional stiffness controls settle time and behavior under load.
Torsional stiffness drives how a robot behaves during acceleration, stopping and direction change. Stiff joints translate motor torque into motion with less elastic twist. More compliant joints store and release energy, which appears as oscillation or longer settling.
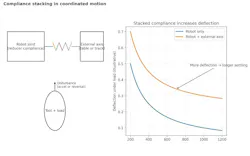
This is why two robots with similar payload and repeatability specs can behave differently in the same process. A compliant drivetrain may still hit the programmed point in a controlled test, but in production it can become sensitive to payload eccentricity, tool mass changes, cable routing and hose management or impacts.
For example, when a robot is paired with a servo-driven rotary table, joint and table compliance stack. The combined system may meet static accuracy targets, yet require additional settle time after each coordinated move. In palletizing, an off-center end-of-arm tool can amplify elastic twist in the wrist joints, extending settle time even when nominal payload is within limits.
Design implication: Stiffness becomes the gating factor when cycle time depends on fast settle, when loads are off-center or when external axes are introduced, because insufficient stiffness directly extends settle windows and limits achievable throughput.
3. Gearbox architecture trades torque density, stiffness and disturbance tolerance.
Six-axis joints commonly use three reducer families: strain-wave gearing, cycloidal reducers and planetary stages, sometimes in combination. Each solves packaging and load transmission differently.
Strain-wave reducers deliver high reduction ratios in compact packages and are widely used in robotics. Their operating principle enables very low backlash. They must still be evaluated as compliance and wear systems rather than ideal transmissions. Very low backlash does not eliminate torsional compliance or long-term performance change.
READ MORE: 8 Common Reasons Causing Gear Failure
Cycloidal reducers are associated with high torque density and robust construction and are often positioned as tolerant of shock and impact loads. In applications with frequent reversals or disturbance loads, shock tolerance becomes a primary concern.
Planetary stages remain relevant because they distribute load across multiple gear meshes and support high efficiency in compact geometries. In robotics, precision planetary stages are often used when designers seek balance among stiffness, efficiency and manufacturable precision.
Design implication: Architecture choice reflects what the robot supplier prioritized—compactness, low backlash, shock tolerance, efficiency or manufacturability. The integrator must anticipate how those priorities appear as motion behavior in the cell, whether as shock sensitivity, longer settling, packaging constraints or maintenance exposure.
4. Rated payload is not the same as usable payload in motion.
Payload ratings are useful but incomplete. Gearboxes experience dynamic torque during acceleration, deceleration and reversal. Heavy tools, off-center loads and aggressive acceleration profiles can drive joint torques well above what static payload suggests.
Integrators often encounter limits here: The robot appears properly sized but struggles with settle time or durability at required cycle rates. Compliance and torque density determine how the drivetrain behaves during rapid stops and reversals. Even brief shock events can dominate wear mechanisms, accelerating backlash growth and shortening expected service intervals.
Design implication: the relevant exercise is dynamic. Joint torque, reflected inertia, acceleration profiles and reversal frequency define what the gearbox experiences.
5. Repeatability is not accuracy, and wear shifts both over time.
Repeatability describes how consistently a robot returns to the same point. Accuracy describes how close it is to the intended point in space. A robot can be highly repeatable yet offset from the target.
Gearbox behavior matters because backlash, compliance and wear influence where the robot ends up under load. Over time, drift can appear as longer settling, path deviation or degraded reversal performance. These effects are often misdiagnosed as tuning issues when the root cause is drivetrain behavior evolving under duty cycle.
READ MORE: How “Smart” Components are Getting Smarter: Valves, Bearings, Gearboxes and Brakes
Design implication: Integration plans should account for calibration strategy, maintenance expectations and performance drift risk when the process depends on tight path control, so as to prevent gradual drift from becoming a production-quality issue.
Gearboxes are internal components, but their effects are external. Reducer tradeoffs determine stiffness, lost motion, settle time and long-term stability under duty cycle and disturbance loads. For integrators, the objective is to anticipate drivetrain behavior so that the robot performs predictably in the application, not just on a specification sheet.
About the Author
Steve Sterling
Steve Sterling is a Minnesota-based freelance writer and editor.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: