Fluid Power Assists Rehabilitation Efforts
Thanks to fluid power’s high power density — the ability to generate large forces from relatively small and light components — some research projects are taking advantage of hydraulics and pneumatics as mobile power sources. Here’s a look at some novel devices currently under development.
Powered ankle
An orthotic device that can apply assistive torque at the ankle joint could significantly improve patient rehabilitation. These devices lift the toes to ensure ground clearance when the leg swings. Users could use a portable powered ankle-foot orthosis (PPAFO) to assist walking, as a gait-training tool in physical therapy, and to provide power-assisted methods for improving strength and range of motion. Current ankle-foot orthoses (AFOs) use mechanical elements to aid the wearer or electrical stimulation to actively assist walking, but these have limited effectiveness.

Researchers have developed a pneumatically powered ankle-foot orthosis. A bottle of compressed CO2 worn on a belt drives the portable device.
Powered systems have been developed to address the inherent limitations of passive AFOs. They provide power to the ankle joint for motion control and propulsion assistance, but the size and power requirements of current designs restrict them to tethered power supplies that cannot be used outside the laboratory.
Researchers from the University of Illinois, Georgia Tech, University of Virginia, and University of Minnesota, working with a grant from the Center for Compact and Efficient Fluid Power, have developed a pneumatically powered PPAFO to provide untethered assistance for daily in-home rehabilitation treatment. According to the researchers, the key advantages of fluid power for this application are the actuators’ high force output in relation to its size and weight; the ability to actuate a joint without a transmission; and the freedom to route pressurized fluid to the actuator through flexible hoses, which lets the actuator be placed in locations not possible with an electric motor. The high force-to-weight ratio and the flexibility to mount components elsewhere on the body let researchers reduce the weight of the device at the shank and foot.
The PPAFO was designed to assist impaired gait by controlling forefoot velocity when the heel hits the floor to prevent foot slap; allowing free range of motion while standing; provide assistive torque for propulsion; and support the foot and prevent it from dropping when the leg swings. It uses a 9-oz bottle of compressed liquid CO2 and a pressure regulator from Supplierpipeline Inc., Waterloo, Ont., to power an SMC, Noblesville, Ind., dual-vane, bidirectional rotary actuator at the ankle joint. The CO2 bottle and regulator are worn on a belt attached to the waist, separate from the structural elements of the PPAFO. This distributes the weight and minimizes loads on the lower limbs. A second pressure regulator from Festo Corp., Hauppauge, N.Y.. modulates torque to support the foot during leg swing.
The direction of torque switches from dorsiflexor (toes up) to plantar flexor (toes down) with two Festo solenoid valves. Control of valve switching is based on inputs from force sensors on the foot. The pressure regulators adjust the magnitude and timing of PPAFO torque output to provide the appropriate assistance while walking. Tests used 90-psig pressure to power the actuator, and longevity of the system was rated by running until final pressure reached 20 psig.
Results showed the device significantly aided dorsiflexor movements and, to a lesser degree, plantar flexor movements as the test subject walked. The loaded position-response speed (600°/sec) was fast enough to initiate different PPAFO motions as needed. Test participants reported that the PPAFO provided noticeable assistance that improved gait quality. The novel, portable pneumatically powered AFO lays the groundwork for future studies.
Stance control
A gait-assist system combines electrical stimulation to paralyzed lower extremity muscles with a controllable hydraulic exoskeleton. The goal is to restore independent mobility to individuals with spinal-cord injuries.
Considerable R&D has gone into developing a lower-limb brace with a controllable mechanism that fully supports the knee when standing, while allowing unhindered knee movement when the leg swings as a user walks or steps. Stance-control knee mechanisms (SCKMs) have used a variety of mechanisms. However, many are difficult to unlock under load, which is necessary during the transition from the stance to the swing phase of walking. Users with weak knee muscles may have difficulty extending the knee to unlock the mechanism.
According to a report in the Journal of Rehabilitation Research & Development, researchers at the Louis Stokes Cleveland Department of Veterans Affairs Medical Center and Case Western Reserve University (both located in Cleveland) have developed a hydraulic SCKM to fully support the knee during stance, yet allow uninhibited leg-swing motion for individuals with paraplegia using muscle stimulation to assist walking.
One design objective of the hydraulic SCKM was to fully support the knee when the leg extends during stance. This lets the SCKM replace muscle activity for static load support and, thus, reduce electrical stimulation to the knee muscles. The muscles rest between contractions, and this should delay fatigue and extend walking distances. The device also had to transition between the support and free-movement phases and lock and unlock responsively and consistently according to the walker’s dynamic requirements. Thus, the unit maximized locking torque at full knee extension while unlocking and minimizing the torque needed to drive the knee during the swing phase of gait.
The SCKM consists of a miniature hydraulic system attached across the knee joint in a knee-ankle-foot orthosis (KAFO). Revolute joints in a four-bar linkage arrangement convert linear motion to rotary. A two-way, two-position, normally closed solenoid valve controls a double-acting hydraulic cylinder. It locks the mechanism against knee flexion, but actuating the cylinder permits knee extension. A single-acting, spring-loaded cylinder serves as an expansion chamber to take up fluid from the drive cylinder during knee movements.
The device used a Clippard, Cincinnati, 9/16-in. bore, 3-in.-stroke double-acting cylinder rated to 2,000 psi; a Clippard ¾-in.-bore, 1-in.-stroke single-acting cylinder for the accumulator; and an Allenair, Mineola, N.Y., two-position, two-port solenoid valve with 1/8-in. ports and a flow coefficient of 0.166 to 0.176. Hydraulic components were selected based on small cylinder bore and stroke to minimize flow volume and overall weight, high operating pressure to minimize component size, high valve flow coefficient to minimize pressure losses, and minimal power consumption of the solenoid valve to prolong use.
A 12-Vdc supply powers the SCKMs. Feedback control opens the solenoid valve during knee extension. A closed-loop controller unlocks the SCKM during the swing phase of gait and locks the mechanism in extension during stance. Feedback signals include valve state, forefoot and heel ground contact, knee angle and velocity, and a synchronization signal from the baseline muscle stimulation pattern.
Results show that hydraulics can be used in a controllable mechanism for restoring gait after paralysis from spinal cord injuries. Evaluation of the SCKM in a hybrid neuroprosthesis by an individual with paraplegia demonstrated that the SCKM could fully support the user during the stance phase of gait without the need for electrical stimulation of knee muscles.
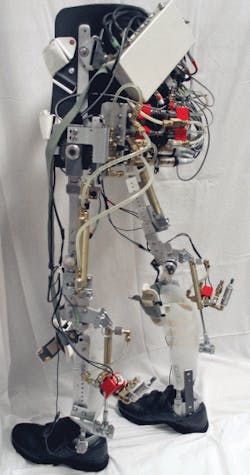
The exoskeleton consists of computer-controlled hydraulic knee and hip circuits. (Photos are courtesy of the Louis Stokes Cleveland VA Medical Center and Case Western Reserve University.)
Weight was not a principal consideration, but the hydraulics comprise about one-fourth of the total mass of the SCKM and KAFO. Structural components, on the other hand, weigh nearly three time as much. However, many structural components were overengineered using steel alloys to ensure structural integrity and safety. Weight was not a principal consideration. Additional R&D is needed to optimize the SCKM’s construction and mass distribution.
Advanced exoskeletons
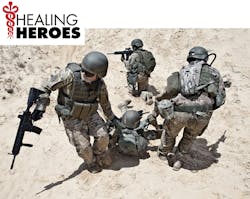
Paralysis, muscle weakness, and lack of coordination are common consequences of combat-related injuries to the central nervous or musculoskeletal systems, according to researchers at the Advanced Platform Technology (APT) Center in Cleveland, a Department of Veterans Affairs Center of Excellence for Rehabilitation Research and Development. To address these issues, APT researchers are designing and testing bracing systems that lock and unlock in coordination with voluntary or stimulated muscle contractions.
The goal is to restore or assist independent walking and upright mobility. A first generation gait-assist system combines electrical stimulation to the paralyzed lower extremity muscles with a controllable hydraulic exoskeleton. It’s intended to help individuals with spinal-cord injuries stand, walk, and climb stairs.
The system consists of computer-controlled hydraulic knee and hip mechanisms that let the lower extremity joints move during walking, yet be fixed during weight bearing so the muscles can rest. The goal is to improve the stability and posture of individuals with paraplegia as compared to walking with electrical stimulation alone, and also reduce user effort and increase walking speed when compared to standard reciprocal braces.
The project’s next step is to make the exoskeleton self-contained and suitable for independent use and clinical testing outside the laboratory. Researchers are working to reduce overall size and weight, as well as refine the controls to coordinate hip and knee motion and damping under load. The goal is to improve foot-floor and step clearance during walking and stair climbing, and provide smoother and more natural gait and stair descent. If successful, the design may give users better mobility, particularly on uneven terrain.
About the Author
Ken Korane
Contributing Editor
Ken is the Executive Editor of Machine Design. He has more than 20 years of service and has a B.S. in Mechanical Engineering from The Ohio State University. Ken has worked as a design engineer for a major fluid-power and motion-control manufacturer, as well as a manufacturer of construction and mining equipment. He is currently responsible for areas including fluid power, mechanical, and fastening & joining technologies.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: