Calculating a practical hotspot safety margin
Two-parameter motor models assume that the entire motor exhibits one dynamic temperature. Four-parameter thermal models are just as easy to use, but far more accurate — and better for calculating realistic hotspot safety margins.
In today's world of motion control, system designers and application engineers look for the highest performance and efficiency from the smallest, most rugged, and least costly servomotors possible. Different calculations are recommended for determining the optimum servomotor for an application.
Although no servomotor delivers infinite torque at any temperature, sometimes they're run to output the maximum peak torque allowed by the manufacturer for the longest possible time. It's in such situations that a servomotor's electrical winding can quickly overheat and even burn up.
To prevent overheating, some servomotors are listed with a high hotspot temperature safety margin, which is defined as the difference between the winding's maximum allowable hotspot temperature and the maximum continuous winding temperature.
Winding temperature and torque output
Most data sheets for both brush and brushless dc (BLDC) servomotors publish the value for each motor's maximum continuous winding temperature, plus corresponding maximum continuous current input and torque output — along with factors that affect the total ambient condition. The latter includes drive electronics, ambient temperature, any heat sinks, and so on. If the maximum continuous current is never surpassed, and the total ambient condition is equivalent to that specified by the manufacturer, a motor's maximum continuous winding temperature won't be exceeded. However, that's not the way a servomotor typically operates.
Instead, servomotors are often commanded to provide a dynamic motion profile containing one or more time periods during which the motor outputs peak torque greater than its maximum continuous value. This is why manufacturers also specify a peak torque for each motor. Depending on the manufacturer and model, a motor's peak-to-continuous-torque ratio typically ranges from 2:1 to 7:1.
Although it's normal for a servomotor to output peak torque in excess of its 1× maximum continuous value, if it does so for too long, then the motor's electrical winding will overheat and could even burn up. For this reason, during times of peak torque output, the motor's duty cycle should be limited to less than 100% — and with a peak torque that far exceeds the 1× maximum continuous value, duty cycle should be lowered even further.
Two-parameter thermal model
For more than 50 years, servomotors have been thermally characterized by what's generally called the two-parameter thermal model. Here, data sheets from most manufacturers for both brush and BLDC servomotors list a value for the motor's winding to ambient thermal resistance Rth (°C/W) plus the corresponding thermal time constant τ (sec) that allows calculation of motor thermal capacitance Cth (Joules/°C) as:
Using this two-parameter thermal model, both manufacturers and motor users attempt to size and select the optimum motor for each application. In fact, many manufacturers have even developed motor sizing programs — into which users supply all necessary application data, and the software determines which motor is optimal for the application.
The only flaw with these software packages is that no manufacturers are willing to size and recommend a competitor's motor; they (and their software) only report which of their motors is most suitable for an application.
For this reason, to effectively compare different manufacturers' motors (and find out which servomotor provides maximum performance density), motor users must size and compare available servomotors on their own.
Two publications have set the standard for servomotor sizing: The Electro-Craft Engineering Handbook (Electro-Craft Corp., DC Motors, Speed Controls, Servo Systems: First Edition, October, 1972) and a paper by S. Noodleman & B. Patel, Duty Cycle Characteristics for DC Servo Motors. (This was Paper TOD-73-30 presented at the 1972 IEEE/IAS Conference in Philadelphia.)
These classic references also outline the most common approach used today for calculating required duty cycle and dynamic motion profile, to ensure that motors won't overheat.
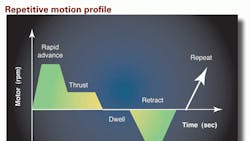
The Electro-Craft Handbook lists the first step in this sizing process: Accurately specify the dynamic motion profile to ensure that the motor won't overheat when executing the required motion profile (see Fig. 1) along with the total ambient condition — ambient temperature, heat sinks, forced cooling — in which the motor operates.
Next, along with motor engineering specifications, we must determine the peak torque and velocity required of the motor during the most demanding portions of the dynamic motion profile. (Again see Fig. 1.) This peak operation point is then entered onto the motor's combined intermittent and continuous torque-speed curves as shown in Fig. 2.
Finally, using the two-parameter thermal model in combination with a time-averaged power dissipation technique, we calculate the root-mean-square (RMS) torque and velocity for the entire motion profile — and then enter this RMS operation point into the combined torque-speed curves of Fig. 2.
If a peak operation point doesn't lie within the continuous torque-speed curve boundary, the selected motor is sure to fail, and a more robust and powerful motor must be chosen.
Conversely, an RMS operation point the lies within the boundary of the continuous torque-speed curve doesn't necessarily guarantee reliable operation. In real-world applications, maximum allowable winding temperatures are sometimes exceeded (and UL 1446 violated) even though the oversimplified two-parameter thermal model reports acceptable winding temperatures.
Page 2 of 3
Four-parameter thermal model
Again, the simple two-parameter thermal model is often used to calculate dynamic winding temperature during all possible modes of servomotor operation. However, experimental measurement shows it's not accurate when current greater than 1× maximum continuous value is supplied to a motor.
The basic problem with the two-parameter model is that it assumes that the entire motor has one dynamic operating temperature, even at the windings.
In fact, measurement proves that within a motor, and even within the winding itself, measurable temperature differences indeed exist. Depending on motor size and operating temperature, there can be a 30° to 50° C temperature difference between the winding and outermost exposed surface.
Higher order thermal models (with four, six, or more parameters) do a better job at differentiating motor-temperature specifics. In fact, even a four-parameter model separates terms for the motor winding's separate dynamic operating temperature, thermal resistance, and thermal time constant, which all differ from those associated with the rest of the motor. In addition, it's fairly easy to obtain the four-parameter model's values.
As shown in Fig. 3, the winding temperature calculated by the four-parameter model rises faster compared to the two-parameter model. Then, as expected, both curves converge at the rated 130° C maximum continuous winding temperature — a common feature of the two models with 1× continuous power dissipation.
Next, we compare the winding temperature rise between the two models for the same servomotor — but this time, we assume that the motor produces 4× peak torque output, corresponding to 16× power dissipation in the winding, as torque output for a permanent-magnet servomotor increases linearly with input current, while electric-resistance power dissipation in the winding increases … as I2R.
As shown in Fig. 4 illustrating 4× peak torque output (which is specified for many servomotors) the four-parameter model shows winding temperature rises from its initial 25° C to the 130° C rated value in only 12 sec; meanwhile, the two-parameter model lags behind and erroneously reports the winding temperature at less than 55° C — a significant and unacceptable difference.
In short, continuing to use the two-parameter thermal model to calculate dynamic winding temperature during times of peak torque output greater than the 1× maximum continuous value gives erroneous (and dangerous) temperature values.
Maximum allowable hotspot temperature
Many manufacturers promote their motors as Underwriters Laboratories (UL) or Canadian Standards Authority (CSA) recognized under the UL 1004 and CSA 22.2/100 standards. Indeed, these are meaningful listings. As part of the UL/CSA recognition process, the insulation system used to construct the motor's electrical winding must comply with the UL 1446 Insulation System standard.
Even so, as listed in Table 4.1 of UL 1446, the maximum hotspot temperature at any time or point in the winding is determined by the motor's insulation Class. Therefore, to be compliant with UL 1446, the winding must have a hotspot temperature rating equal to or greater than the maximum continuous winding temperature.
To ensure that a motor remains UL 1446 compliant and to prevent overheating, some manufacturers install a temperature sensor/switch inside the motor to cut power from the drive when the winding approaches its maximum allowable hotspot temperature. However, there are some practical flaws in this approach. For one reason, switches often can't react quickly enough to compromised situations and hotspot temperature surges.
Page 3 of 3
Required: Hotspot safety margin
As mentioned, the two-parameter model isn't accurate enough to calculate dynamic winding temperature when more than 1× maximum continuous current value is supplied to the motor; windings heat up much faster than calculated by the two-parameter model.
In fact, even the four-parameter model isn't perfect. Although it differentiates a separate dynamic winding temperature, the entire winding is assumed to have one uniform temperature value — which isn't realistic. That said, four-parameter accuracy is sufficient in most cases, including for hotspot safety margin calculations.
Few servomotor manufacturers publish the four-parameter thermal model values for brush and BLDC motors. Therefore, it's reasonable to assume that most perform motor sizing and dynamic winding temperature calculations using the two-parameter thermal model. Because manufacturers generally publish only one value for both the motor's winding to ambient thermal resistance plus its thermal time constant, motor users tend to use this two-parameter model in making dynamic temperature calculations — unless they measure the more reliable four-parameter values themselves. This is rather easy.
As shown in Fig. 1, sizing and selecting the optimum motor for an application begins by defining the dynamic motion profile, along with the total ambient condition in which the motor will operate. Next, using the two-parameter thermal model in combination with the time averaged power dissipation technique, a candidate motor's RMS operation point is determined and entered onto its continuous torque-speed curve as shown in Fig. 2. If this RMS operation point lies outside the boundary of the continuous torque-speed curve, then this particular motor-drive combination will overheat and cannot be used unless the motion profile is modified (or the ambient condition is changed.)
Conversely, if the RMS operation point lies within the boundary of the motor's continuous torque-speed curve, then the motor may be suitable, but one more investigation is needed.
Figs. 3 and 4 show the four-parameter model: Even though the “time averaged” power dissipation technique and two-parameter model indicates that the winding's maximum continuous temperature shouldn't be exceeded, the four-parameter model shows (and actual measurement proves) that during times of peak torque output, maximum continuous winding temperature can be exceeded.
Therefore, for the best performance and UL 1446 protection, the insulation Class of a servomotor's electrical winding must allow a hotspot temperature that is greater than maximum continuous winding temperature … and the greater this hotspot temperature safety margin, the better the protection.
Some servomotors have a 130° C maximum continuous winding temperature and Class H insulation, for a 180° C maximum allowable hotspot temperature — and a 180° - 130° C = 50° C hotspot temperature safety margin.
These servomotors are also specified with a 2:1 peak-to-continuous torque ratio; combined with their 50° C hotspot temperature safety margin, this provides these motors with the highest possible thermal protection during times of peak torque output.
In comparison, many BLDC servomotors have a hotspot temperature safety margin that's 15° C or less (many have zero margin) and harsh peak-to-continuous torque ratios between 3:1 and 5:1.
References and supporting documents are available from the author at [email protected]. For more information, call (952) 368-3434 or visit exlar.com.
Topics covered
- Winding temperature and torque
- Models and their accuracy
- Temperature variations
- Safety margins
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: