The ABCs (and 1-2-3s) of variable frequency drives
Variable frequency drives (or VFDs) are widely used throughout industry to provide adjustable speed control of ac motors. Although modern versions are relatively simple to install and operate, VFDs are quite complex, containing a myriad of advanced hardware and software. VFD implementation and operation can often be improved by understanding internal VFD processes. To that end, we present the terminology used to describe VFD internal operations and external interfaces. This lesson contains 40 of the most important VFD terms for today's design engineers.
This file type includes high resolution graphics and schematics when applicable.
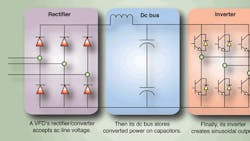
1. Rectifier/converter: One of the three primary sections of a VFD's main power circuit, and first in terms of power flow. Incoming ac line voltage is rectified to dc voltage in the converter section, which consists of diodes, silicon-controlled rectifiers (SCRs), or insulated gate bipolar transistors (IGBTs) connected in a full-wave bridge configuration.
2. Dc bus: The second primary section of a VFD's main power circuit, chiefly comprised of capacitors that store power rectified by the converter.
3. Inverter: The third and final primary section of a VFD's main power circuit.
The inverter section is comprised of IGBTs that create sinusoidal output current using pulsed dc bus voltage, or pulse width modulation (PWM). VFDs themselves are sometimes called inverters, as the presence of an inverter section is the primary difference between VFDs and dc drives.
4. IGBT: Very fast semiconductor switches that are actuated electronically.
By applying a small positive voltage between the gate and emitter points of the IGBT, current is allowed to flow from a collector point to an emitter point. IGBT switching rates in VFDs range from 2 to 15 kHz. (See carrier frequency.)
5. PWM: A VFD control scheme in which a constant dc voltage is used to reconstruct a pseudo ac voltage waveform using a set of six power switches, usually IGBTs.
Varying the width of the fixed-amplitude pulses controls effective voltage. This pulse width modulation scheme works because the motor is a large inductor that does not allow current to pulse like the voltage.
Sequenced correctly, PWM outputs motor current in a nearly perfect sinusoidal waveform.
6. Carrier frequency: In PWM-based VFDs, the rate at which output transistors are gated or turned on, usually 2 to 15 kHz. (See image.) Higher values yield better current waveform, but more VFD losses.
7. Common busing: A method for connecting the dc bus sections of separate VFDs, or operating multiple independent inverter sections from a common dc source. The advantage of this method is that motor-operation sequencing can be used to balance motoring and regenerating so that little or no dynamic braking is necessary.
8. Dynamic braking: In VFDs, this refers to connecting resistors to the dc bus through a transistor. The transistor is closed and shunts power to the resistors only when the dc bus voltage exceeds a predetermined level, which usually occurs when the load is decelerated quickly.
9. Ground: Also known as earth, ground is the input ac power supply's reference point. If a power supply conductor accidentally touches the ground, then an ac source protection circuit immediately acts to electrically isolate the ac source from the point of contact. To create the ground point, a rod is normally driven into the earth, and all grounded circuits are connected to that point.
When a VFD chassis ground is connected back to this ground, a safe conduction path is created in case a conductor accidentally shorts to a metal portion of the enclosure.
10. kVA: The effective size of a VFD based on the output volts and amps it supplies. (kVA = Volts ¡Á Amps ¡Á ¡Ì3 for a three-phase output.) Multiplying output VA by the load power factor yields output power. Knowing the rated input kVA is useful when sizing components used with VFDs, such as transformers and fuses.
11. kW/hp: Power measurement of the motor, where kW = hp ¡Á 0.746.
Due to a reactive component of the current drawn by induction motors, a motor's power capability is not just volts ¡Á amps, but hp.
12. Leakage current: The derivative of common-mode voltages over time (dv/dt) generated by PWM pulses interacting with parasitic capacitances found between motor cables and the ground conductor, and between the motor's stator and rotor.
Leakage current produced in this way is found on the ground circuit and can present problems for sensitive equipment attached to the same ground.
13. Leakage inductance: A portion of a motor's inductive properties; synonymous with flux or voltage losses. Voltage loss results from voltage that is dropped across the motor conductors, yet produces no flux to link stator and rotor.
A typical example of leakage inductance is the flux created at each turn of the stator winding that occurs outside of the core ¡ª created by the stator poles and not linked to the rotor. Higher operating currents and frequencies magnify the influence of leakage inductance.
14. Line reactor: A device comprised of a conductor coiled around a magnetic core. When current flows through the coils, a magnetic field is established in the core. Any change to current amplitude or direction is opposed by the existing magnetic field in the core until equilibrium is achieved. A line reactor reduces discontinuity of the current drawn by a VFD's converter section. Reducing this discontinuity or current-draw distortion reduces the harmonic current created by the VFD.
Because the line reactor is installed in front of the VFD, it also helps protect the drive from most voltage transients by dropping voltage by an amount proportional to the current flowing through it. The terms reactor and inductor are often used interchangeably and refer to the same device, although reactance and inductance are not interchangeable terms.
15. Link choke: A single reactor electrically placed ahead of the dc bus capacitors in a VFD. A link choke reduces harmonics created by the VFD (due to its distorted input current draw) in the same way as a line reactor, but provides less protection against voltage transients. Unlike a line reactor, a dc link choke doesn't have a current-dependent voltage drop.
16. Swing choke: Similar in function to a link choke in that it reduces current harmonics created by a VFD, as well as bus ripple inside the VFD. When a VFD is partially loaded, it creates a higher harmonic content than at full load. A swing choke increases its inductance when the current passing through it is lower, usually due to partial loading. This increased inductance reduces the harmonics as a percent of load current.
17. Matrix converter: An ac-to-ac VFD that doesn't have a rectifier/converter or a dc bus section to convert ac to dc to ac, as in most commercially available drives. Nine bidirectional switches are controlled depending on target output voltage and frequency. Benefits include four-quadrant operation in a small footprint, low input current harmonic distortion, and lower common mode voltage and common mode current. A matrix drive's output voltage is, however, limited to approximately 90% of input voltage.
18. Motor poles: In an induction motor, the stator is used to create the magnetic fields inside the motor that magnetize its rotor and cause shaft rotation. Coils are wrapped around symmetrical iron cores, in turn arranged around the stator's inner diameter.
Electromagnets are created when current is passed through the coils. In a single-phase motor, each of these electromagnets is matched by another one located 180¡ã away with the opposite polarity, thus creating a magnetic field.
In a three-phase ac motor, three of these electromagnets constitute a motor pole. The number of poles in a motor is one of the factors used to determine the motor's torque per hp and rpm per Hz.
19. Pre-charge circuit: When line power is first applied to a VFD, the dc bus capacitors are in an uncharged state and behave much like a short circuit.
The large inrush of current caused by this shorted state can damage the capacitors and other VFD main circuit components. A pre-charge circuit limits the inrush current while the capacitors begin to charge. Once the capacitors charge to the target voltage, a contactor bypasses the pre-charge circuit.
20. Reflected wave: All PWM-based VFDs produce output voltage pulses with short rise and fall times. These high dv/dt pulses interact with cable inductance and capacitance and produce a reflection of the incoming voltage pulses at the motor terminals.
If the distance between the motor and drive exceeds the allowable distance, reflected waves can make the line-line peak value of the voltage at the motor terminals nearly twice the dc bus voltage. This high voltage can exceed the voltage rating of the motor's insulation.
21. Regeneration: A motor can become a generator and send power back to the main line whenever the rotor is rotating faster than the stator field. Under such a condition, the load is said to regenerate. This may occur whenever the VFD attempts to decelerate the motor, or when the load overhauls the motor. In this state, the motor's back electromagnetic field is greater than applied voltage, which causes increasing bus voltage and probable VFD fault.
To avoid VFD faults during regeneration, some form of power dissipation is used ¡ª such as dynamic braking or line regeneration.
22. Saturation: In a VFD, saturation refers to the state at which voltage applied to the motor is more than what is necessary to produce sinusoidal magnetic field density. Increasing voltage once in the saturation state produces no extra mechanical torque, but does increase motor heating due to increased current.
23. Single phase: A typical 230-Vac single-phase electrical system uses two hot wires and a neutral to transmit power. Such a system is mainly used in residences where three-phase power isn't needed, or in remote areas where three-phase power transmission is too costly.
24. Three phase: Mainly used in commercial and industrial facilities, a three-phase electrical system uses a neutral or ground, and three hot wires that each transmit one ac phase.
Each phase is a sine wave offset by 120 electrical degrees, or one third of the period. Each phase peaks at a different time, giving the total power supplied the appearance of continuous dc power.
25. Sinking and sourcing: Pertains to current flows through digital inputs and outputs of VFDs and other components. In a sinking circuit, current flows from the voltage supply, through the load, to the switch, and then to ground.
NPN transistors are usually associated with sinking circuits. In a sourcing circuit, current flows in the opposite direction. PNP transistors are usually associated with sourcing circuits.
26. Slip: The speed difference between the motor's rotating magnetic field (created by the stator) and motor-shaft rotation. Slip is necessary to create torque in an induction motor.
27. 12-pulse rectification: Used to lessen the input-current total harmonic distortion (THD). Voltage distortion is also reduced, as current distortion causes voltage distortion. 12-pulse rectification requires a dual diode bridge input (six pulses each) and a multi-phase transformer. The latter offsets the voltage waveform by 30¡ã through one of the six-pulse input diode bridges. This offset causes the fifth and seventh harmonics to be eliminated; these account for about 75% of THD, so input-current THD is decreased to about 10% of rated current at the rated operating point.
28. 18-pulse rectification: Used to lessen the input-current THD. Voltage distortion is also reduced because current distortion causes voltage distortion.
18-pulse rectification requires a three-diode bridge input (six pulses each) and a multi-phase transformer. The transformer offsets the voltage waveform by 20¡ã through each of the six-pulse input diode bridges. This offset causes the fifth, seventh, eleventh, and thirteenth harmonics to be eliminated. These four harmonics account for about 90% of THD, so the input-current THD is decreased to about 5% of rated current at the rated operating point.
29. Control board: The control board is a printed circuit board (PCB) that is the main interface component used to connect external equipment and operator interface components to and from the VFD.
Acting as the VFD's brain, the PCB accepts real-world commands such as ¡°Run¡± or ¡°Speed Up¡± and executes the target function. The control PCB generally interfaces to the VFD's main circuit via the gate drive board.
30. Gate drive board: A PCB containing the circuitry necessary for operating (gating) the output transistors of the VFD. The gate drive board can also monitor main circuit temperature, current, and voltage. Typically, smaller VFDs have no separate gate drive, but combine gating with logic power supplies to form a power board.
31. Intelligent power module (IPM): Used in the output section of some VFDs. IPMs include IGBTs, gate circuitry, thermal sensors, and self-protection devices. An IPM is easier to include in a VFD package and takes up less space than if the IPM components were individually laid out on an external PCB.
32. Copy keypad: A VFD keypad that can store programming to the non-volatile RAM of the keypad itself. These stored parameters often can be loaded into another VFD requiring the same programming.
33. Ac PM motors: Permanent magnet (PM) motors are a type of synchronous ac motor. Two main ac PM motor subtypes include surface-mount and interior. No slip occurs between the stator and rotor during normal operation of PM motors, unlike in common induction motors.
There are no I2R losses in the rotor, either, giving PM motors higher efficiency ratings than induction motors. These energy savings and smaller sizes make PM motors a useful alternative to induction motors, though not all VFDs can operate PM motors.
34. Two-contactor bypass: A VFD accessory that allows motor operation across the line or through the VFD. One contactor is installed between the incoming line and motor, while the other is installed between the VFD output and motor.
A two-contactor bypass allows the motor to be run directly from the incoming line, bypassing the VFD; it can be used to run the motor at a constant speed directly from the incoming line in case of VFD failure.
35. Three-contactor bypass: A VFD accessory that allows motor operation across the line or through the VFD.
One contactor is installed between the incoming line and VFD input; another (bypass) contactor is installed between the incoming line and motor.
A third is installed between the VFD output and motor.
A three-contactor bypass allows the motor to be run directly from the incoming line, bypassing the VFD. This allows for VFD servicing while the motor is being run from the incoming line, and can also be used to run the motor at constant speed at a higher efficiency than with the VFD in circuit.
36. V/F mode: Also known as volts-per-hertz mode, this is a simple control method for ac induction motors via a VFD.
A ratio is established in accordance with the base voltage and motor base frequency ratings. This ratio yields a linear pattern that the VFD follows to produce rated motor torque. The ratio of voltage to frequency is the flux level in the machine, which in turn dictates the amount of torque that the machine produces at a given operating point.
37. Open-loop vector: A complex but effective motor-control method that allows VFDs to realize the best characteristics of dc drive control (accurate torque control over a wide speed range) without the brush maintenance and high initial cost of dc motors. For optimum performance, the position or deflection of the motors rotor must be known or accurately estimated.
The lack of actual shaft position feedback in open-loop vector control necessitates the calculation of rotor position by other means ¡ª but the cost savings of eliminating the feedback device, VFD input, and associated cabling offsets the slight loss of motor performance, as compared to closed-loop vector operation.
38. Closed-loop vector: A complex but highly effective method for motor control that allows VFDs to realize dc drive control benefits without the physical limitations of dc motors.
Feedback devices such as encoders or resolvers supply necessary motor slip information to close the loop between VFD output frequency and actual motor shaft speed.
39. PID: The proportional, integral, and derivative control algorithm is widely used throughout industrial control.
When a process loop is created by adding feedback (from a variable such as airflow, pressure, or level) and sent to the VFD, regulation of the variable is possible via PID loop control.
The VFD's PID algorithm uses mathematical properties to determine reaction to changes between the system setpoint and its actual state as measured by feedback.
40. Auto tuning: A process in which the VFD tests an attached and unloaded motor to determine the best tuning parameters.
This glossary contains important VFD definitions, but is not exhaustive. For more information about variable frequency drives, or how they're integrated into larger motion designs, contact the authors through yaskawa.com.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: