The misconceptions of EV Motor Testing

Already more than 100âyears old, the electric motor is currently being reinvented for use in electrically or hybrid-powered automobiles and vehicles. But the range of electric vehicles must be extended if consumers are to accept them. The quest for better EV range has put performance tests on EV drivetrains in the limelight.
Unfortunately, the way these tests are run today makes them inefficient and limits the information they provide to design engineers. In addition, the performance tests for motors have generally focused on general-purpose induction motors for industrial use. Routine tests for industrial induction motors include measurement of power and current input at no-load and rated voltage, current input with a locked rotor at rated voltage, plus data necessary for determining efficiency, power factor, starting torque, pull-up torque, breakdown torque, rated-load slip, and rated-load temperature rise.
But these parameters don’t say much about drivetrains powering EVs. Efficiency tests of industrial motors, for example, generally involve simple power measurements at a few different loads. These operating conditions are quite unlike the dynamic changes that EV motors and drivetrains experience. Fortunately, test equipment has been developed to handle the characterization of modern EV drivetrains. It uses digital torque measurement technology and high-speed recording of measurement data for both electrical and mechanical signals to give engineers an idea of how EV motors are likely to perform in every day use.
Fallacies
Electric cars currently have a range of about 100 km before they need a recharge. These levels aren’t enough for longer trips, so there’s a big push to extend the range of electric vehicles. There was hope that development of better batteries would solve the problem. Although there are promising technologies still in research labs, it has become clear that battery chemistries practical for production in the foreseeable future have almost reached the limit of their performance.
Thus, developers of electric vehicles who want to extend range must pursue a means of doing so that doesn’t involve better battery technology. One promising approach is to boost the efficiency of the motor. The reason is that today’s electric motors in EVs have a utilization rate of about 50%; half the energy they use is not converted into output. This fact surprises some engineers because electric motors in industrial uses such as elevators hit efficiency levels of around 90 %.

It is useful to understand why industrial electric motors are rated with much higher efficiencies than those powering EVs. NEMA Premium motors, for example, which became mandatory under the Energy Independence and Security Act of 2007 for many applications that require integral horsepower motors, have efficiency ratings ranging from 80 to about 96% depending on horsepower rating. A point to note is that the efficiency of these motors is measured only while the motor powers its rated load. The efficiency rating does not consider other operational factors such as the amount of time the motor spends accelerating to speed or coasting to a stop. For many industrial motor applications, acceleration and coasting time is negligible. So it may be reasonable to ignore such factors when making efficiency calculations.
However, the situation is quite different in the case of EVs. A motor in an EV or hybrid vehicle spends an appreciable part of its operational time either accelerating or decelerating. When characterizing the motor, its performance during these periods can’t be ignored. All in all, EVs and hybrid electric drivetrains operate in dynamic environments that are nothing like those of most industrial motors.
Electric motors in EVs and hybrids operate in ways that are more analogous to those of internal-combustion engines than to industrial electric motors. However, performance tests on electric and hybrid motors are fundamentally different than performance tests on internal combustion engines. For example, test setups must record signals from internal combustion engines that represent primarily mechanical parameters such as torque. In contrast, test setups for EV motors and drivetrains must measure electrical signals on the inverter as well as on the motor itself. Tests typically take place with the drivetrain connected with a dyno. Most of the measurements are straightforward: voltage, current, torque, speed. An important additional entity to acquire is temperature, as the motor behavior heavily depends on its winding temperature. Analysis based on continuous raw data can be helpful here. Developers can use this data to compute important factors such as iron loss, airgap torque, or equivalent motor circuitry.
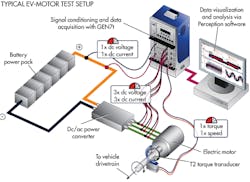
The need to record electrical and mechanical parameters raises fundamental questions regarding synchronicity. In concrete terms, there must be no phase shift in the system used to acquire measurement data when recording different signals. Otherwise the evaluations are worthless. Thus, performance tests on electric motors typically include multimeters to measure dc current and voltage on batteries, power meters to record ac current and voltage on the inverter, and measurement data-acquisition systems to record the mechanical variables torque and speed.
Unfortunately, it is extremely difficult if not impossible to synchronize the timing of the measuring systems that are used to characterize EV motors. One problem is that measurement data is stored in three different systems and data formats. But the main difficulty is in the actual data: The user has access to modeled data, not raw data. However, recently developed test setups for EV motors are better in this regard.
To verify measurement results and performance data in detail (and ultimately improve the electric drive), engineers need access to raw data. But the power meters currently in use will only give modeled data. Often there is no documentation even for the algorithms used in the performance analysis.
The lack of raw data in tests frequently leads to bizarre situations. Developers even report efficiency levels greater than 100%. This is not credible, but there has been no way to check the clearly incorrect values. Adding to the potential for confusion is a lack of standard test procedures for characterizing EV motors. Standards bodies have spent the past few years defining test procedures for EV components. However, the emphasis has been on battery tests and on safety. Consequently, there is as yet no accepted standard for testing or characterizing EV motors.
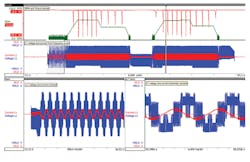
The lack of standards forces developers to devise their own EV drivetrain tests. Of course, developers want to gauge performance under conditions that mimic those of the real world. So it is typical for tests to vary the motor load, vary the operating temperature, and vary other operating parameters such fast/slow accelerations and decelerations. These are dynamic tests. The only way to get a clear picture of the data from such tests is to record all points synchronously and continuously. Test points would include the voltage and current from the inverter (for all phases) and the motor output (torque and speed). The key to improving the efficiency of the drivetrain is to compare all signals other at specific load points. The resulting data helps optimize the motor’s consumption of power and, thus, maximizes the distance the EV can travel.
Test setups designed specifically for EV motors help show how motors are likely to perform in real conditions. They now provide full access to raw data, and handle synchronous measurement data acquisition for mechanical and electrical signals. For example, a setup developed by HBM includes a T12 digital torque transducer that records torque and speed as measurement variables. It also includes a high-speed data-acquisition system that synchronously records electrical signals from the inverter and motor as well as torque transducer data. Finally, measurement-data software gives access to raw data and lets developers analyze it later as well.
Measurement-data software can process data rapidly so measured values appear on-screen in just a few seconds. This contrasts with measurement systems that only use power meters. Power meters have a relatively long processing time, sampling data at a rate of one to 20 values/sec. It takes time to put this kind of data up on a screen.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: