Motors and Drives Leading the Way for Robots

This file type includes high resolution graphics and schematics when applicable.
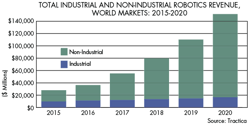
Robots are everywhere! In modern automation, they are an essential tool on most plant floors. In our homes, they have become cleaning tools and personal assistance/entertainment devices. This current trend is not dying down as robot manufacturers find new ways to fine-tune their design, creating nimbler and faster robots. In a recent study from Tractica, 6.5 million robots were sold in 2015. Per their predictions, 100 million robots will be sold worldwide within in the next five years. Currently, the types of robots sold are split 50/50 between industrial and non-industrial. Robots such as placement robotic arms and XY gantry robots are prevalent in manufacturing and packaging, but the future of robotic sales looks to be for personal assistance robots. These robots will help us in everyday tasks as well as assisting the elderly and helping educate children.
Modern Robots

The current trend for robotic design is small and lightweight. Modern engineering design stresses how important it is to focus on envelope size, lightweight design, and energy efficiency. Parker Hannifin has introduced a series of motors that help cut down on weight and envelope size. Its frameless motor K-Series does away with the main housing and shaft to cut down on weight. It’s ideal for machine designs that require high performance in small spaces. The motors allow for direct integration with the mechanical transmission device. This eliminates parts that add size, allows for minimum motor size per application, and gives designers the advantage of reducing cost. The frameless motors contain a motor stator and rotor and come in different outer diameter sizes: 32, 44, 64, 89, and 178 mm. They benefit from peak torque values of 0.26 Nm up to a max of 81.74 Nm and speeds of up to 5,000 revolutions per minute (RPM) with a higher speed windings of 30,000 rpm if needed. The K-motors have a pre-installed integral commutation board; the motor and feedback are an integrated unit. The use of rare earth magnets provides high resistance to thermal demagnetizing and high-flux in a small volume. They are Class H insulated for up to 155°C temperature operation, meeting UL requirements. Lastly, they use high-density copper winding for low thermal resistance and consistent performance. Weight range on the series is a minimum 0.15 lb to a max of 13.98 lb.

While the K-Series provides customization for specific designs, Parker Hannifin’s P-Series of motors and drives provide flexibility. For Gantry and Cartesian robots, motors and drives need to have general-purpose utility and be flexible so that one prevents the constant switching out of drives. The P-Series drives and motors operate in a variety of machine-controlled architectures. The drives have EtherCAT connectivity for high-speed motion bus, USB communications for convenient setup, and 8 inputs/4 outputs with EtherCAT models. The Safe Torque Off feature for the EtherCAT models immediately cuts power to the motor, then dynamic braking quickly brings the motor to a stop. The line of drives from Parker Hannifin also has auto-tuning features. In real time, the drives can apply tuning via adaptive resonant filters and detecting vibration peaks to dial in inertia and tuning gains. The P-Series motors need to be flexible, which is why they follow the BiSS-C standard for open-source absolute-encoder design. Absolute encoders are becoming the norm for drives due to their cost-saving benefits.

Schneider Electric offers all-in-one robotic solutions. They are add-ons to the PacDrive product line geared toward providing fast and easy-to-integrate robotic solutions. The motors, drives, and robotic assembly designed by Schneider Electric ease installation. Included in the PacDrive portfolio are the Delta 2 and Delta 3 picker mechanisms, which are available with installed motors of the Lexium SH3 or Lexium 62 ILM families. The PacDrive Delta 2 has a max load capacity of 55 lb and the Delta 3 is capable of 33.1 lb. The PacDrive Delta 3 has three or four degrees of freedom and is IP65 rated for pharmaceutical and food application. The SH3 servo motors are available in five flange sizes: 55, 70, 100, 140, and 205 mm. They have a nominal torque range of 0.5 to 50.7 Nm, peak torque values of 1.5 Nm to a max of 330 Nm., and speed of 1,500 RPM to a max of 8,000 RPM. The Lexium SH3 servo motors are equipped with integrated encoders that have a single-turn (131,072 points/turn) (2) or multi-turn (131,072 points/turn x 4,096 turns) integrated encoders. A stainless-steel version of the SH3 motors, the SHS family, is also available in three flange sizes: 55, 70, and 100 mm.
The Lexium 62 ILM integrated drive and motor bundle is compact and offers quick interconnects and hybrid cables for signal and power level. When connected, they provide automatic network configuration and has diagnostic capabilities. The LXM62 ILM is considered plug-and-play technology due to the ease of installation. It is capable of a nominal torque range of 0.5 Nm to 12.5 Nm, a peak torque of 3.5 to 55 Nm, and speed of 1500 RPM to a max of 6000 RPM. They are available in flange sizes of 70, 100, and 140 mm. The ILM integrated drive and motors take up to 90% less cabinet space, up to 90% less wiring time, and up to 70% less cabling. Due to their fast installation time and cost-saving cable handling, the ILM integrated drives are frequently used for rotary-capping applications.
The Future of Robotics

As mentioned earlier, robots are leaning away from assembly and automation, and shifting focus toward entertainment and personal assistance. The robot in the image is called “Hector” and was developed by the Biomechatronics Research Group at Bielefeld University. The robot is about 3 feet tall and weighs 26.5 lb. The exoskeleton consists of carbon fiber-reinforced plastic, which makes it extremely lightweight. The purpose of the project is to achieve better control of underlying coordination principles as well as to investigate the fundamental concepts of how to elastically control actuated driven robotic systems.

Each individual leg of the robot contains an EC 45 flat Maxon motor, with a total of 18 motors. The EC 45 flat is a brushless motor delivering 50 watts of power at a diameter of 45 mm. The motors for this particularly design are custom built by Maxon, as the elastomer couplings were integrated directly into the drives.

The next phase of robotics will introduce personal assistants. “Romeo,” designed by French robotics company Aldebaran, aims to be the perfect assistant for the elderly. Romeo is almost 5 feet tall and weighs 81.6 lb. The researchers at Aldebaran are currently testing to see how far they can push Romeo’s limits. The goal is to maximize its walking ability, navigation, and human-robot interaction. Eventually Romeo will be able to respond to human body and facial expressions.

Romeo uses 37 Maxon RE 40 motors. The RE 40 motor uses graphite brushes at 150 watts of power. The RE 40 has a 40 mm diameter and has nominal torque ranges of 94.9 mNm to 190 mNm. The motors come with iron-less Maxon winding, ensuring excellent control behavior.

The DRC-Hubo robot was one of the first-place finalists of the DARPA Robotics Challenge in 2015. The DARPA Robotics challenge consists of realistic scenarios such as driving a car, cutting holes into walls, opening doors, and negotiating difficult and uneven terrain. The Korea Advanced Institute of Science and the Rainbow Company built the robot in conjunction using 33 Maxon motors, mainly the EC-4pole 30 brushless motor. The robot operates on two legs, but benefits from being able to utilize rollers built into the knees. This helped Hubo complete the required competition tasks in the shortest time. The robot has an aluminum casing instead of plastic, stands 6 feet tall and weighs 176.4 lb.

The EC-4pole 30 brushless motors deliver significant power at 200 watts per motor. The Hubo uses 25 of these motors, which operate at overload conditions. The robot was equipped with cooling fans so that the motors could operate safely even in overload conditions. Hubo demonstrates the closest example of how technology of today can be used to advanced and push the capabilities of modern robotics.
This file type includes high resolution graphics and schematics when applicable.
